Применение частотных преобразователей в вентиляционных и насосных системах позволяет
Векторное и скалярное управление преобразователями частоты
Большая часть производимой в мире электрической энергии потребляется двигателями переменного тока. Управление частотой питающего напряжения и тока может снизить потребление энергии на 40-70% и повысить эффективность и производительность оборудования.
Выбор правильного метода управления — одна из основных задач проектировщика, правильное решение обеспечивает максимальный технический и экономический эффект. Давайте рассмотрим преимущества и недостатки скалярного управления.
Управление
Преобразователи частоты звена постоянного тока чаще всего используются в приводах двигателей до 1 кВ. Регулирование частоты напряжения в таких устройствах достигается за счет изменения циклов открытия/закрытия транзисторных ключей путем изменения длительности управляющих импульсов широтно-импульсного модулятора ШИМ.
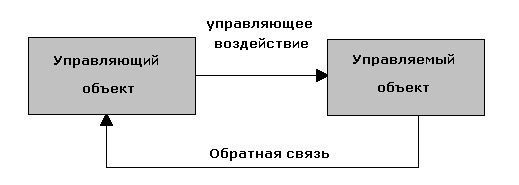
Различают два типа контроля:
- Вектор.
- Скаляр.
Первый метод основан на взаимосвязи между величиной, частотой и фазой напряжения питания двигателя. Этот метод позволяет регулировать частоту вращения вала в широком диапазоне, контролировать крутящий момент, обеспечивать жесткость механических характеристик во всем диапазоне частот, осуществлять пуск при значительной нагрузке.
Однако этот метод имеет свои недостатки. Основным недостатком является высокая вычислительная сложность. Векторные преобразователи частоты оснащаются высокопроизводительными контроллерами, что приводит к значительному увеличению стоимости преобразователя частоты. Такие устройства используются в приводах динамически нагруженных механизмов, подъемных устройств, прецизионных станков и т.д.
Принцип скалярного или вольт-частотного регулирования заключается в поддержании постоянного значения U/f (скалярной величины и частоты напряжения питания) при любой угловой скорости вращения вала. Контролируется только величина и фаза напряжения на выходе преобразователя частоты. Давайте подробнее рассмотрим принцип работы и типы скалярного управления.

Типы скалярного управления
Поддержание постоянного значения U/f обеспечивает относительно постоянный магнитный поток в зазоре двигателя. Если отношение напряжение/частота увеличивается, двигатель переходит в перевозбужденное состояние, если уменьшается, электрическая машина переходит в невозбужденное состояние.
Отношение U/f рассчитывается на основе номинального напряжения и частоты двигателя, фаза не учитывается, поэтому вычислительная сложность для ШИМ-контроллера невелика. Скалярные инверторы оснащены простыми контроллерами.
Существует 2 метода скалярного управления:
- Без обратной связи.
- С обратной связью по скорости вращения вала.
Вольт-частотный метод без обратной связи широко используется в системах управления асинхронными двигателями, в приводах с постоянной нагрузкой.
Благодаря простой конструкции без преобразователей обратной связи, низким требованиям к вычислительным возможностям блока управления, относительно низкой стоимости, такие преобразователи частоты широко используются в простых приводах. Скалярный метод позволяет реализовать групповое управление электродвигателями одного типа с одновременным запуском и остановкой.
Вольт-частотное управление с энкодером (датчиком скорости или вращения) значительно расширяет возможности этого метода. В этом случае значение U/f сохраняется на разных скоростях.
При увеличении угловой скорости вращения вала напряжение на обмотке статора двигателя также должно увеличиваться. Однако в асинхронных машинах скорость вращения магнитного поля статора не совпадает со скоростью вращения вала. Скольжение в этом случае зависит от нагрузки. Чтобы компенсировать проскальзывание, в цепь привода добавляется датчик скорости или энкодер. Обратная связь позволяет увеличить точность измерения скорости до 0,03%. Поэтому скалярное управление с помощью энкодера может устранить недостаточную точность регулирования угловой частоты вала.
Недостатками этого метода являются сложность системы и необходимость установки и настройки энкодера.
Преимущества и недостатки метода скалярного управления
Основным преимуществом вольтовых преобразователей частоты является их простота и низкая стоимость. Цена таких устройств значительно ниже, чем у векторных инверторов. Нет необходимости устанавливать датчик частоты вращения вала в цепях управления. Конфигурирование скалярного преобразователя частоты также намного проще. Такие устройства также позволяют управлять несколькими электродвигателями.
Недостатком вольт-частотного регулирования является зависимость скорости вращения вала от нагрузки. Без обратной скорости невозможно компенсировать проскальзывание ротора. Также невозможно одновременно контролировать скорость вращения вала и крутящий момент. Скалярные инверторы также не обладают высокой перегрузочной способностью. Другим существенным недостатком является потеря жесткости механических характеристик на низких скоростях.
Сфера применения
Несмотря на усовершенствования в области векторного управления, скалярные преобразователи частоты все еще широко используются. Они используются в электроприводах различного назначения с постоянной или изменяющейся по известному закону нагрузкой.
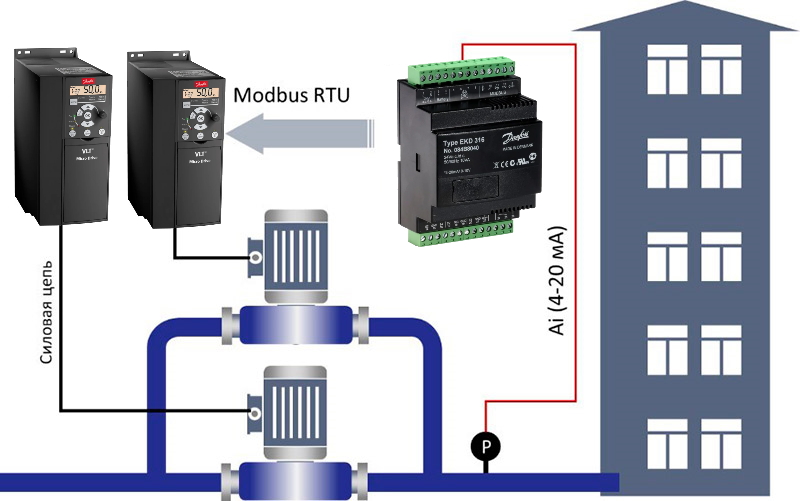
Использование ЧРП в вентиляционном и насосном оборудовании позволяет:
- Для регулирования потока воздуха или давления и потока жидкости без необходимости использования механических демпферов и задвижек.
- Плавный пуск и остановка без риска гидравлического удара по системе.
- Автоматическое исключение резонансных частот при управлении вентиляционными установками.
Скалярные преобразователи могут использоваться для задания режимов работы насосного оборудования или воздуходувок в соответствии с известными законами управления.
Установка преобразователей частоты в приводах машин:
- Кинематическая схема значительно упрощена, частотное управление позволяет обойтись без приводных передаточных механизмов.
- Это повышает точность обработки и, благодаря точной настройке скорости, значительно снижает количество дефектов.

Преобразователи частоты снижают производственные затраты за счет снижения затрат на электроэнергию.
Преобразователи частоты также устанавливаются на двигатели конвейеров и других питателей. Это позволяет:
- Точная настройка скорости движения, адаптированная к конкретному процессу.
- Остановитесь в случае аварии.
- Устраняет толчки и рывки при старте, движении и остановке.

Преобразователи частоты снижают износ механических компонентов транспортирующего оборудования и позволяют устанавливать автоматические режимы управления в соответствии с особенностями производственного процесса.
Векторное управление позволяет значительно увеличить диапазон регулирования, точность управления, повысить скорость работы электропривода. Этот метод обеспечивает прямое управление крутящим моментом двигателя.
Методы управления асинхронным двигателем.
Компания «Русэлком» производит и поставляет преобразователи частоты для управления асинхронными двигателями. Поэтому, чтобы понять принцип частотного регулирования, давайте подробнее рассмотрим работу асинхронного двигателя и методы частотного регулирования.
Структура асинхронного двигателя схематично показана на рис. 2. Двигатель состоит из неподвижной части, называемой статором, и подвижной (вращающейся) части, называемой ротором.
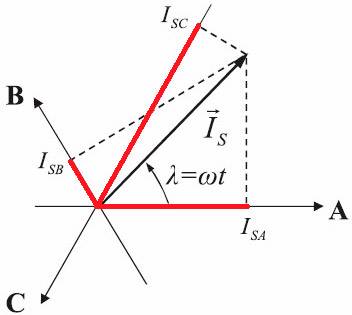
Три группы обмоток A-B-C размещаются в пазах статора. Обмотки статора смещены друг относительно друга в пространстве на угол 120°. Это одно из двух условий, необходимых для создания вращающегося магнитного поля статора.
Ротор двигателя выполнен в виде сплошного цилиндра из специальной электротехнической стали, с закороченными обмотками.
Рис.2: Схематическое сечение асинхронного двигателя.
Обмотки статора питаются трехфазным напряжением qa, qc, qs от сети с частотой
Напряжения ua, tsv, tsc сдвинуты по фазе относительно друг друга на 120°. Это второе условие, необходимое для создания вращающегося магнитного поля статора.
Когда на обмотки статора электродвигателя подается трехфазное напряжение с определенной частотой, возникает вращающееся магнитное поле. Скорость вращения этого поля в радианах дается известной формулой
— число пар полюсов статора.
Преобразование скорости вращения поля, измеряемой в радианах, в скорость вращения, выраженную в оборотах в минуту, производится по следующей формуле
где 60 — коэффициент пересчета размеров.
Подставляя в это уравнение скорость вращения поля, получаем
Из формулы видно, что скорость вращения магнитного поля статора зависит от частоты питающего напряжения и количества пар полюсов.
Например, в однополюсном двигателе с частотой питающего напряжения 50 Гц скорость вращения магнитного поля составляет 3000 об/мин.
В синхронном электродвигателе скорость вращения ротора в установившемся режиме равна скорости вращения магнитного поля статора
В асинхронном электродвигателе скорость вращения ротора в установившемся режиме отличается от скорости вращения статора на величину скольжения. В примере однополюсного асинхронного двигателя скорость вращения ротора при напряжении питания 50 Гц и скольжении 5% составляет 2850 об/мин.
Поэтому скорость вращения ротора синхронных и асинхронных двигателей зависит от частоты питающего напряжения.
На этом основан принцип регулирования частоты.
Изменение частоты с помощью преобразователя частоты  вход двигателя, мы управляем скоростью вращения ротора.
вход двигателя, мы управляем скоростью вращения ротора.
Наиболее распространенные частотно-регулируемые приводы на базе асинхронных двигателей с короткозамкнутым ротором используют скалярное и векторное управление частотой.
При скалярном управлении амплитуда и частота напряжения, подаваемого на двигатель, изменяются по определенному закону. Изменение частоты питающего напряжения приведет к отклонению максимального крутящего момента двигателя, пускового момента двигателя, КПД и коэффициента мощности от расчетных значений. Поэтому для поддержания требуемых характеристик двигателя необходимо изменять амплитуду напряжения при изменении частоты.
В существующих преобразователях частоты со скалярным управлением максимальный момент двигателя обычно поддерживается постоянным по отношению к моменту сопротивления вала двигателя. Это означает, что при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального крутящего момента двигателя к текущему моменту нагрузки остается неизменным. Это соотношение называется перегрузочной способностью двигателя.
Если перегрузочная способность постоянна, то номинальный коэффициент мощности и КПД Максимальный вращающий момент, развиваемый двигателем, определяется следующим соотношением.
Максимальный крутящий момент, развиваемый двигателем, определяется следующим соотношением
где — — постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется типом нагрузки на валу электродвигателя.
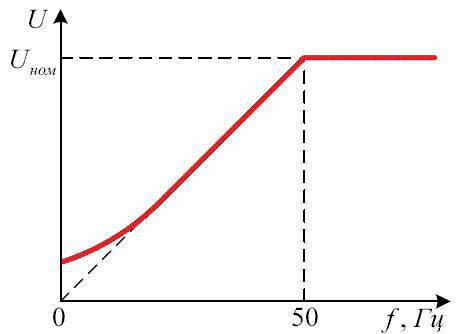
При постоянном моменте нагрузки сохраняется соотношение U/f = const и, как следствие, обеспечивается постоянный максимальный момент двигателя. Характер зависимости напряжения питания от частоты для случая постоянного момента нагрузки показан на рисунке 2. Наклон линии на графике зависит от величины момента сопротивления и максимального момента двигателя.
Однако на низких частотах максимальный крутящий момент двигателя начинает снижаться с определенного значения частоты. Чтобы компенсировать это и увеличить пусковой момент, используется повышение уровня напряжения питания.
В случае вентиляторной нагрузки соотношение U/f 2 = const. Вольт-частотная характеристика источника питания для этого случая показана на рис. 3. При регулировании в низкочастотном диапазоне максимальный крутящий момент также снижается, но это не критично для данного типа нагрузки.
Используя зависимость между максимальным моментом, напряжением и частотой, можно построить график зависимости U от f для любого типа нагрузки.
Важным преимуществом скалярного метода является возможность одновременного управления группой двигателей.
Скалярное управление достаточно для большинства практических применений частотно-регулируемого привода с диапазоном регулирования скорости двигателя до 1: 40.
Векторное управление позволяет значительно увеличить диапазон регулирования, точность регулирования и скорость привода. Этот метод обеспечивает прямое управление крутящим моментом двигателя.
Крутящий момент определяется током статора, который создает магнитное поле возбуждения. При прямом управлении моментом помимо амплитуды необходимо изменять фазу тока статора, или вектор тока. Именно отсюда происходит термин «борьба с переносчиками».
Для управления вектором тока и, следовательно, положением магнитного потока статора относительно вращающегося ротора, необходимо знать точное положение ротора в любой момент времени. Эта проблема решается с помощью дистанционного датчика положения ротора или путем определения положения ротора из расчетов других параметров двигателя. Этими параметрами являются токи и напряжения обмоток статора.
Векторный привод с частотным управлением без датчика обратной связи по скорости менее дорогой, но векторное управление требует большого объема и высокой скорости вычислений преобразователя частоты.
Кроме того, для прямого управления моментом при низких, близких к нулю скоростях работа частотно-регулируемого привода без обратной связи по скорости невозможна.
Векторное управление с преобразователем с обратной связью по скорости обеспечивает диапазон регулирования до 1:1000 или более, с точностью регулирования скорости до сотых долей процента и точностью регулирования крутящего момента до единиц процента.
В синхронных приводах с частотным управлением используются те же методы управления, что и в асинхронных приводах.
Однако чистое частотное управление синхронными двигателями используется только при малой мощности, когда моменты нагрузки малы, а инерция приводного механизма мала. При высоких уровнях мощности только накопители с вентилятором способны выполнить эти условия. При других типах нагрузки двигатель может потерять синхронизацию.
В мощных синхронных приводах используется метод самосинхронизирующегося управления частотой для предотвращения выхода двигателя из синхронизации. Особенность этого метода заключается в том, что управление преобразователем частоты осуществляется строго в соответствии с положением ротора двигателя.
Компания «Русэлком» производит и поставляет преобразователи частоты для управления асинхронными двигателями. Поэтому, чтобы понять принцип регулирования частоты, давайте подробнее рассмотрим работу асинхронного двигателя и методы регулирования его частоты.
Структура асинхронного двигателя схематично показана на рис. 2. Двигатель состоит из неподвижной части, называемой статором, и подвижной (вращающейся) части, называемой ротором.
Три группы обмоток A-B-C размещаются в пазах статора. Обмотки статора смещены друг относительно друга в пространстве на угол 120°. Это одно из двух условий, необходимых для создания вращающегося магнитного поля статора.
Ротор двигателя выполнен в виде сплошного цилиндра из специальной электротехнической стали с закороченными обмотками.
Рис.2: Схематическое сечение асинхронного двигателя.
Трехфазное напряжение qa, qc, qs с частотой подается на обмотки статора от источника питания
напряжения Ce, C, Dc сдвинуты по фазе относительно друг друга на 120°. Это второе условие, необходимое для создания вращающегося магнитного поля статора.
Когда на обмотки статора электродвигателя подается трехфазное напряжение с определенной частотой, создается вращающееся магнитное поле. Скорость вращения этого поля в радианах дается известной формулой
— число пар полюсов статора.
Преобразование скорости вращения поля, измеряемой в радианах, в скорость вращения, выраженную в оборотах в минуту, производится по следующей формуле
где 60 — коэффициент пересчета размеров.
Подставляя в это уравнение скорость вращения поля, получаем
Из формулы следует, что скорость вращения магнитного поля статора зависит от частоты питающего напряжения и количества пар полюсов.
Например, в однополюсном двигателе с напряжением питания 50 Гц скорость вращения магнитного поля составляет 3000 об/мин.
В синхронном двигателе установившаяся скорость вращения ротора равна скорости вращения магнитного поля статора
В асинхронных машинах установившаяся частота вращения ротора отличается от частоты вращения статора на величину скольжения. В примере однополюсного асинхронного двигателя скорость вращения ротора при напряжении питания 50 Гц и скольжении 5% составляет 2850 об/мин.
Поэтому скорость вращения ротора синхронного и асинхронного двигателя зависит от частоты питающего напряжения.
Метод управления частотой основан на этой зависимости.
Изменение частоты на входе двигателя с помощью преобразователя частоты вход двигателя, мы управляем скоростью вращения ротора.
Наиболее распространенные частотно-регулируемые приводы на базе асинхронных двигателей с короткозамкнутым ротором используют скалярное и векторное управление частотой.
При скалярном управлении амплитуда и частота напряжения, подаваемого на двигатель, изменяются по определенному закону. Изменение частоты питающего напряжения приводит к отклонению от проектных значений максимального и пускового моментов двигателя, КПД, коэффициента мощности. Поэтому для поддержания требуемых характеристик двигателя необходимо изменять амплитуду напряжения при изменении частоты.
В существующих преобразователях частоты со скалярным управлением отношение максимального момента двигателя к моменту сопротивления вала обычно поддерживается постоянным. Это означает, что при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального крутящего момента двигателя к текущему моменту нагрузки остается постоянным. Это соотношение называется перегрузочной способностью двигателя.
Если мощность перегрузки постоянна, то номинальный коэффициент мощности и КПД двигателя практически не изменяются во всем диапазоне регулирования скорости.
Максимальный крутящий момент, который может развивать двигатель, определяется следующей зависимостью
где — — постоянный коэффициент.
Следовательно, зависимость между напряжением питания и частотой определяется характером нагрузки на вал электродвигателя.
При постоянном моменте нагрузки сохраняется соотношение U/f = const и, как следствие, обеспечивается постоянный максимальный момент двигателя. Характер зависимости напряжения питания от частоты для случая постоянного момента нагрузки показан на рис. 2. Наклон линии на графике зависит от величины момента сопротивления и максимального момента двигателя.
Однако на низких частотах максимальный крутящий момент двигателя начинает снижаться с определенного значения частоты. Чтобы компенсировать это и увеличить пусковой момент, используется повышение уровня напряжения питания.
В случае вентиляторной нагрузки существует зависимость U/f 2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рисунке 3. При регулировании в низкочастотном диапазоне максимальный крутящий момент также снижается, но это не критично для данного типа нагрузки.
Используя зависимость между максимальным моментом, напряжением и частотой, можно построить график зависимости U от f для любого типа нагрузки.
Важным преимуществом скалярного метода является возможность одновременного управления группой двигателей.
Скалярное управление достаточно для большинства практических применений частотно-регулируемого привода с диапазоном регулирования скорости двигателя до 1: 40.
Векторное управление позволяет значительно увеличить диапазон регулирования, точность регулирования и скорость привода. Этот метод обеспечивает прямое управление крутящим моментом двигателя.
Крутящий момент определяется током статора, который создает магнитное поле возбуждения. При прямом управлении моментом необходимо изменять не только амплитуду и фазу тока статора, т.е. вектор тока. Именно отсюда происходит термин «борьба с переносчиками».
Для того чтобы управлять вектором тока и, следовательно, положением магнитного потока статора относительно вращающегося ротора, необходимо знать точное положение ротора в любой момент времени. Эта проблема решается с помощью дистанционного датчика положения ротора или путем определения положения ротора из расчетов других параметров двигателя. Этими параметрами являются токи и напряжения обмоток статора.
Частотно-регулируемый привод с векторным управлением без датчика обратной связи по скорости дешевле, но векторное управление требует от преобразователя частоты большой емкости и высокой скорости вычислений.
Кроме того, для прямого управления моментом при низких, близких к нулю скоростях работа частотно-регулируемого привода без обратной связи по скорости невозможна.
Векторное управление с преобразователем с обратной связью по скорости обеспечивает диапазон регулирования до 1:1000 и выше, с точностью регулирования скорости до сотых долей процента и точностью регулирования крутящего момента до единиц процента.
В синхронных частотно-регулируемых приводах используются те же методы управления, что и в асинхронных.
Однако чистое частотное управление синхронными двигателями используется только при малой мощности, когда моменты нагрузки малы, а инерция приводного механизма мала. При высоких уровнях мощности только накопители с вентиляторами могут соответствовать этим условиям. При других типах нагрузки двигатель может потерять синхронизацию.
В мощных синхронных приводах используется метод самосинхронизирующегося управления частотой для предотвращения выхода двигателя из синхронизации. Особенность этого метода заключается в том, что управление преобразователем частоты осуществляется строго в соответствии с положением ротора двигателя.
DETAIL_TEXT_TYPE] => html [PREVIEW_TEXT] => Компания «Русэлком» производит и поставляет преобразователи частоты для управления асинхронными двигателями. [
PREVIEW_TEXT] => «Русэлком» производит и поставляет преобразователи частоты для управления асинхронными двигателями. [PREVIEW_TEXT_TYPE] => html [
PREVIEW_TEXT_TYPE] => html [DETAIL_PICTURE] => [
DETAIL_PICTURE] => [TIMESTAMP_X] => 18.06.2020 13:26:52 [
TIMESTAMP_X] => 18.06.2020 13:26:52 [ACTIVE_FROM] => 23.03.2018 [
ACTIVE_FROM] => 23.03.2018 [LIST_PAGE_URL] => /info/articles/ [
LIST_PAGE_URL] => /info/articles/ [DETAIL_PAGE_URL] => /info/articles/method-upravleniya-asinhronnym-dvigatelem/ [
DETAIL_PAGE_URL] => /info/articles/methods-upravleniya-asinhronnym-dvigatelem/ [LANG_DIR] => / [
LANG_DIR] => / [CODE] => metody-upravleniya-asinhronnym-dvigatelem [
CODE] => metody-upravleniya-asinhronnym-dvigatelem [EXTERNAL_ID] => 3724 [
EXTERNAL_ID] => 3724 [IBLOCK_TYPE_ID] => md_info_v2 [
IBLOCK_TYPE_ID] => md_info_v2 [IBLOCK_CODE] => articles_v2 [
IBLOCK_CODE] => articles_v2 [IBLOCK_EXTERNAL_ID] => articles_v2 [
IBLOCK_EXTERNAL_ID] => articles_v2 [LID] => v2 [
LID] => v2 [NAV_RESULT] => [DISPLAY_ACTIVE_FROM] => 23.Mar.2018 [IPROPERTY_VALUES] => Array ( [ELEMENT_META_TITLE] => Управление частотным преобразователем, векторное, скалярное. [ELEMENT_META_KEYWORDS] => Управление преобразователем частоты, [ELEMENT_META_DESCRIPTION] => Управление преобразователем частоты, читайте о векторных и скалярных методах управления преобразователями частоты на ruselkom. ) [FIELDS] => Array ( ) [DISPLAY_PROPERTIES] => Array ( ) [IBLOCK] => Array ( [ID] => 24 [
ID] => 24 [TIMESTAMP_X] => 31.05.2018 16:04:13 [
TIMESTAMP_X] => 31.05.2018 16:04:13 [IBLOCK_TYPE_ID] => md_info_v2 [
IBLOCK_TYPE_ID] => md_info_v2 [LID] => v2 [
LID] => v2 [CODE] => articles_v2 [
КОД] => articles_v2 [NAME] => articles [
НАЗВАНИЕ] => статьи [ACTIVE] => Y [
АКТИВНО] => Y [SORT] => 500 [
SORT] => 500 [LIST_PAGE_URL] => /info/articles/ [
LIST_PAGE_URL] => /info/articles/ [DETAIL_PAGE_URL] => #SITE_DIR#info/articles/#ELEMENT_CODE#/ [
DETAIL_PAGE_URL] => #SITE_DIR#info/articles/#ELEMENT_CODE#/ [SECTION_PAGE_URL] => [
DESCRIPTION] => [DESCRIPTION_TYPE] => text [
DESCRIPTION_TYPE] => text [RSS_TTL] => 24 [
RSS_TTL] => 24 [RSS_ACTIVE] => Y [
RSS_ACTIVE] => Y [RSS_FILE_ACTIVE] => N [
RSS_FILE_ACTIVE] => N [RSS_FILE_LIMIT] => [
RSS_FILE_DAYS] => [RSS_YANDEX_ACTIVE] => N [
RSS_YANDEX_ACTIVE] => N [XML_ID] => articles_v2 [
XML_ID] => articles_v2 [TMP_ID] => afd46b6a87d28320f2b47835c962dab0 [
TMP_ID] => afd46b6a87d28320f2b47835c962dab0 [INDEX_ELEMENT] => Y [
INDEX_ELEMENT] => Y [INDEX_SECTION] => N [
INDEX_SECTION] => N [WORKFLOW] => N [
WORKFLOW] => N [BIZPROC] => N [
BIZPROC] => N [SECTION_CHOOSER] => L [
SECTION_CHOOSER] => L [LIST_MODE] => [
LIST_MODE] => [RIGHTS_MODE] => S [
RIGHTS_MODE] => S [SECTION_PROPERTY] => N [
SECTION_PROPERTY] => N [PROPERTY_INDEX] => N [
PROPERTY_INDEX] => N [VERSION] => 1 [
ВЕРСИЯ] => 1 [LAST_CONV_ELEMENT] => 0 [
LAST_CONV_ELEMENT] => 0 [SOCNET_GROUP_ID] => [
EDIT_FILE_AFTER] => [SECTIONS_NAME] => Разделы [
SECTIONS_NAME] => Разделы [SECTION_NAME] => Раздел [
SECTION_NAME] => Раздел [ELEMENTS_NAME] => Статьи [
ELEMENTS_NAME] => Статьи [ELEMENT_NAME] => Статья [
ELEMENT_NAME] => Статья [EXTERNAL_ID] => articles_v2 [
EXTERNAL_ID] => articles_v2 [LANG_DIR] => / [
LANG_DIR] => / [SERVER_NAME] => abb-privod.ru [
SERVER_NAME] => abb-privod.ru ) [SECTION] => Array ( [PATH] => Array ( ) ) [SECTION_URL] => [META_TAGS] => Array ( [TITLE] => Методы управления асинхронными двигателями. [ELEMENT_CHAIN] => Методы управления асинхронными двигателями. [BROWSER_TITLE] => Инверторное управление, векторное, скалярное. [KEYWORDS] => Управление инвертором, [DESCRIPTION] => Управление инвертором, читайте о методах векторного и скалярного управления инвертором на сайте ruselkom. ) [DETAIL_PICTURE_POSITION] => alignleft [COL_DATA] => Array ( [CLASS] => col-4 [DATA_BIG] => data-big=»1″ ) [INCLUDE_FILES] => Array ( [0] => products.php [1] => projects.php [2] => cert.php [3] => reviews.php [4] => staff.php ) —>
- 23.Мар.2018
Компания «Русэлком» производит и поставляет преобразователи частоты для управления асинхронными двигателями. Поэтому, чтобы понять принцип регулирования частоты, давайте подробнее рассмотрим, как работает асинхронный двигатель и его методы регулирования частоты.
Структура асинхронного двигателя схематично показана на рис. 2. Двигатель состоит из неподвижной части, называемой статором, и подвижной (вращающейся) части, называемой ротором.
Три группы обмоток A-B-C размещаются в пазах статора. Обмотки статора смещены друг относительно друга в пространстве на угол 120°. Это одно из двух условий, необходимых для создания вращающегося магнитного поля статора.
Ротор двигателя выполнен в виде сплошного цилиндра из специальной электротехнической стали, с закороченными обмотками.
Рис.2: Схематическое сечение асинхронного двигателя.
На обмотку статора подается трехфазное напряжение qa, qc, qs частоты
Напряжения tsA, tsv, tsc сдвинуты по фазе на 120°. Это второе условие, необходимое для создания вращающегося магнитного поля статора.
Когда на обмотки статора электродвигателя подается трехфазное напряжение с частотой, создается вращающееся магнитное поле. Скорость вращения этого поля в радианах дается известной формулой
— число пар полюсов статора.
Преобразование скорости вращения поля, измеряемой в радианах, в скорость вращения, выраженную в оборотах в минуту, производится по следующей формуле
где 60 — коэффициент пересчета размеров.
Подставляя в это уравнение скорость вращения поля, получаем
Из формулы следует, что скорость вращения магнитного поля статора зависит от частоты питающего напряжения и количества пар полюсов.
Например, в однополюсном двигателе с частотой питающего напряжения 50 Гц скорость вращения магнитного поля составляет 3000 об/мин.
В синхронном электродвигателе скорость вращения ротора в установившемся режиме равна скорости вращения магнитного поля статора
В асинхронном электродвигателе скорость вращения ротора в установившемся режиме отличается от скорости вращения статора на величину скольжения. В примере однополюсного асинхронного двигателя скорость вращения ротора при напряжении питания 50 Гц и скольжении 5% составляет 2850 об/мин.
Поэтому скорость вращения ротора синхронных и асинхронных двигателей зависит от частоты питающего напряжения.
На этом основан принцип регулирования частоты.
Изменение частоты с помощью преобразователя частоты входы двигателя, мы управляем скоростью вращения ротора.
Наиболее распространенные частотно-регулируемые приводы на базе асинхронных двигателей с короткозамкнутым ротором используют скалярное и векторное управление частотой.
При скалярном управлении амплитуда и частота напряжения, подаваемого на двигатель, изменяются по определенному закону. Изменение частоты питающего напряжения приведет к отклонению максимального крутящего момента двигателя, пускового момента двигателя, КПД и коэффициента мощности от расчетных значений. Поэтому для поддержания требуемых характеристик двигателя необходимо изменять амплитуду напряжения при изменении частоты.
В существующих преобразователях частоты со скалярным управлением максимальный момент двигателя обычно поддерживается постоянным по отношению к моменту сопротивления вала двигателя. Это означает, что при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального крутящего момента двигателя к текущему моменту нагрузки остается неизменным. Это соотношение называется перегрузочной способностью двигателя.
Если перегрузочная способность постоянна, то номинальный коэффициент мощности и КПД Максимальный вращающий момент, развиваемый двигателем, определяется следующим соотношением.
Максимальный крутящий момент, развиваемый двигателем, определяется следующим соотношением
где — — постоянный коэффициент.
Поэтому частотная зависимость напряжения питания определяется типом нагрузки вала электродвигателя.
Для постоянного момента нагрузки поддерживается соотношение U/f = const, в результате чего обеспечивается постоянный максимальный момент двигателя. Характер зависимости напряжения питания от частоты для случая постоянного момента нагрузки показан на рис. 2. Наклон линии на графике зависит от величины момента сопротивления и максимального момента двигателя.
Однако на низких частотах максимальный крутящий момент двигателя начинает снижаться с определенного значения частоты. Чтобы компенсировать это и увеличить пусковой момент, используется повышение уровня напряжения питания.
В случае вентиляторной нагрузки соотношение U/f 2 = const. Вольт-частотная характеристика источника питания для этого случая показана на рис. 3. При регулировании в низкочастотном диапазоне максимальный крутящий момент также снижается, но это не критично для данного типа нагрузки.
Используя зависимость между максимальным моментом, напряжением и частотой, можно построить график зависимости U от f для любого типа нагрузки.
Важным преимуществом скалярного метода является возможность одновременного управления группой двигателей.
Скалярное управление достаточно для большинства практических применений частотно-регулируемого привода с диапазоном регулирования скорости двигателя до 1: 40.
Векторное управление позволяет значительно увеличить диапазон регулирования, точность регулирования и скорость привода. Этот метод обеспечивает прямое управление крутящим моментом двигателя.
Крутящий момент определяется током статора, который создает магнитное поле возбуждения. При прямом управлении моментом помимо амплитуды необходимо изменять фазу тока статора, или вектор тока. Именно отсюда происходит термин «борьба с переносчиками».
Для того чтобы управлять вектором тока и, следовательно, положением магнитного потока статора относительно вращающегося ротора, необходимо знать точное положение ротора в любой момент времени. Эта проблема решается с помощью дистанционного датчика положения ротора или путем определения положения ротора из расчетов других параметров двигателя. Этими параметрами являются токи и напряжения обмоток статора.
Векторный привод с частотным управлением без датчика обратной связи по скорости менее дорогой, но векторное управление требует большого объема и высокой скорости вычислений преобразователя частоты.
Кроме того, для прямого управления моментом при низких, близких к нулю скоростях работа частотно-регулируемого привода без обратной связи по скорости невозможна.
Векторное управление с преобразователем с обратной связью по скорости обеспечивает диапазон регулирования до 1:1000 и более, при этом точность регулирования скорости составляет сотые доли процента, а точность регулирования крутящего момента — единицы процента.
В синхронных приводах с частотным управлением используются те же методы управления, что и в асинхронных приводах.
Однако чистое частотное управление синхронными двигателями используется только при малой мощности, когда моменты нагрузки малы, а инерция приводного механизма мала. При высоких уровнях мощности только накопители с вентилятором способны выполнить эти условия. При других типах нагрузки двигатель может потерять синхронизацию.
В мощных синхронных приводах используется метод самосинхронизирующегося управления частотой для предотвращения выхода двигателя из синхронизации. Особенность этого метода заключается в том, что управление преобразователем частоты осуществляется строго в соответствии с положением ротора двигателя.
— Векторное управление с замкнутым контуром;
Векторное и скалярное управление преобразователями частоты
+7(499)322-95-57
- О проекте О проекте
- Главная страница
- О проекте
- Карта сайта
- ЧАСТО ЗАДАВАЕМЫЕ ВОПРОСЫ
- Терминология
- Низковольтный ПЧ
- Высоковольтные инверторы
- Низковольтные ПП
- Регулятор высокого напряжения
- Испытательные стенды
- Аксессуары
- Последние новости
- Интервью
- Статьи
- События
- Акции
- Производители оборудования Производители
- ABB
- Усовершенствованное управление промышленными устройствами
- AuCom Electronics Ltd
- B&R
- Баумюллер
- Bosch Rexroth
- Методы управления
- Danfoss
- Delta Electronics
- Легкий привод
- Eaton
- EKF
- Эмотрон АБ
- ERMAN
- ESQ
- Приводы EURA
- Fuji Electric
- GE
- Гефран Сией
- Grandrive
- Hitachi
- Hyundai Heavy Industries
- IC Electronics
- Привод IDS
- IEK
- INNOVERT
- Inovance
- INSTART
- Контроллеры Invertek
- Инвт
- Компания «Джеки
- Кеб
- Lenze
- LS
- Micno
- Mitsubishi Electric
- Omron
- ONI
- Паркер
- Powtran
- Prostar
- Rockwell Automation
- Сантерно
- Schneider Electric
- Швейный европривод
- Siemens
- Tecorp Electronics
- Toshiba
- Vacon
- Weg
- Yaskawa
- Bitech
- Автоматизация Vesper
- Vnir
- Горнозаводский комбинат
- Ижевский радиозавод
- Баран
- Optimelektro
- Приводная техника
- Руселком
- Силиум
- Стройтехавтоматика
- Технорос
- Триол
- CEAZ-ELPRI
- ЭКРА
- Электроректификатор
- Электрозавод
- Электротекс
- Elsiele
- Эрасиб
- Эффективные системы
- Поставщики Поставщики
- CosPA
- ONI
- СТОИК
- Danfoss
- Веспер
- EKF
- Каталоги
- ГОСТы и ТУ
- Видео
- Обратная связь
- Сотрудничество
- Реклама на сайте
- Работа
- Ответственность
Согласно последним статистическим данным, около 70% всей вырабатываемой в мире электроэнергии потребляется электроприводами. И этот процент растет с каждым годом.
При правильном управлении двигателем можно достичь максимального КПД, максимального крутящего момента на валу электрической машины, и общая производительность машины увеличится. Эффективно работающие электродвигатели потребляют минимальное количество энергии и обеспечивают максимальную экономичность.
Для электродвигателей, питающихся от инвертора, эффективность в значительной степени зависит от метода, выбранного для управления электрической машиной. Только понимая преимущества каждого метода, инженеры и конструкторы приводных систем смогут добиться максимальной эффективности от каждого метода управления.
Для асинхронных двигателей, подключенных к преобразователю частоты, существуют следующие основные методы управления:
— Скалярное управление U/f;
— Скалярное управление U/f с энкодером;
— Векторное управление в открытом контуре;
— Векторное управление в замкнутом контуре;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения ширины импульса для создания аналогового сигнала.
СКАЛАРНЫЙ КОНТРОЛЬ
Метод управления U/f
Скалярный метод управления асинхронным двигателем переменного тока предполагает поддержание постоянного отношения напряжения к частоте (V/f) во всем диапазоне скоростей, при этом регулируется только величина и частота напряжения питания.
Отношение V/f рассчитывается на основе номинальных значений (напряжения и частоты) контролируемого двигателя переменного тока. Поддерживая соотношение U/f постоянным, мы можем поддерживать магнитный поток в зазоре двигателя относительно постоянным. Если отношение U/f увеличивается, двигатель перевозбуждается, и наоборот, если отношение уменьшается, двигатель находится в невозбужденном состоянии.
Временная зависимость частоты мощности двигателя для скалярного управления
Изменение напряжения питания двигателя при скалярном управлении
На низких скоростях необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение U/f на низких скоростях устанавливается выше номинального значения. Метод скалярного управления наиболее часто используется для управления асинхронными двигателями. Благодаря своей простоте и минимальному количеству параметров, необходимых для работы, он часто используется в простых системах привода. Этот метод управления не требует установки энкодера или обязательной настройки частотно-регулируемого привода. Это приводит к снижению затрат на дополнительное оборудование (датчики, кабели обратной связи, реле и т.д.) Управление U/f довольно часто используется в высокочастотном оборудовании, напр. Он часто используется в станках с ЧПУ для управления скоростью вращения шпинделя.
U/f — единственный способ управления скоростью асинхронного электродвигателя, который позволяет управлять несколькими приводами от одного преобразователя частоты. Следовательно, все машины запускаются и останавливаются одновременно и работают с одинаковой частотой.
Однако этот метод управления имеет ряд ограничений. Например, при использовании метода управления U/f без энкодера нет абсолютно никакой уверенности в том, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины ограничен 150% при частоте 3 Гц. Да, ограниченный крутящий момент более чем достаточен для большинства существующих применений. Например, практически все вентиляторы и насосы используют метод управления U/f.
Этот метод относительно прост благодаря более «свободной» спецификации. Регулирование скорости обычно находится в диапазоне от 2% до 3% от максимальной выходной частоты. Скоростной отклик рассчитывается для частот выше 3 Гц. Скоростной отклик преобразователя частоты определяется скоростью реакции на изменение опорной частоты. Чем выше скорость реакции, тем быстрее реакция привода на изменения в задании скорости.
Диапазон регулирования скорости по методу U/f составляет 1:40. Умножьте это значение на максимальную рабочую частоту электропривода, чтобы получить минимальную частоту, на которой может работать электрическая машина. Например, если максимальная частота составляет 60 Гц, а диапазон — 1:40, минимальная частота будет равна 1,5 Гц.
Диаграмма U/f определяет взаимосвязь между частотой и напряжением во время работы частотно-регулируемого привода. Соответственно, кривая задания скорости (частоты двигателя) будет определять, помимо значения частоты, значение напряжения, подаваемого на клеммы электрической машины.
В современном преобразователе частоты операторы и технические специалисты могут выбрать желаемую схему управления U/f с помощью одного параметра. Предварительно установленные шаблоны уже оптимизированы для конкретных применений. Также возможно создание пользовательских шаблонов, оптимизированных для конкретного частотно-регулируемого привода или системы двигателя.
Такое оборудование, как вентиляторы или насосы, имеет момент нагрузки, который зависит от их скорости. Переменный крутящий момент (рисунок выше) в U/f предотвращает ошибки управления и повышает эффективность. Эта модель управления уменьшает намагничивающие токи на низких частотах путем снижения напряжения на электрической машине.
Машины с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование, используют метод управления постоянным крутящим моментом. Постоянная нагрузка требует полного тока намагничивания при любой скорости. Поэтому характеристическая кривая будет прямой во всем диапазоне скоростей.
Метод управления U/.f с энкодером
При скалярном методе управления скорость асинхронного двигателя регулируется путем изменения напряжения и частоты статора таким образом, чтобы магнитное поле в зазоре поддерживалось на требуемом уровне. Чтобы поддерживать постоянное магнитное поле в зазоре, отношение U/f должно быть постоянным на разных скоростях.
При увеличении частоты вращения напряжение питания статора также должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна скорости вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Поэтому скалярная система управления без обратной связи не может точно управлять скоростью при наличии нагрузки. Для решения этой проблемы в систему может быть добавлена обратная связь по скорости, что позволит компенсировать проскальзывание.
Поэтому, если необходимо повысить точность регулирования скорости, в систему управления добавляется энкодер. Введение обратной связи по скорости энкодера позволяет повысить точность управления до 0,03%. Выходное напряжение по-прежнему будет определяться по заданной формуле U/f.
Этот метод управления не получил широкого распространения, поскольку преимущества, которые он дает по сравнению со стандартными функциями U/f, минимальны. Начальный крутящий момент, скорость реакции и диапазон регулирования скорости идентичны таковым у стандартной коробки передач U/f. Кроме того, работа энкодера может быть проблематичной при увеличении рабочей частоты, поскольку энкодер имеет ограниченное число оборотов.
При использовании Скалярное управление
Скалярное управление трехфазными двигателями является хорошей альтернативой для приложений, которые не имеют переменных нагрузок и не имеют высоких динамических нагрузок (вентиляторы, насосы). Скалярное управление не требует датчика положения ротора, а скорость вращения ротора может быть оценена по частоте питающего напряжения. При использовании скалярного управления не требуется высокопроизводительный цифровой сигнальный процессор, как при векторном управлении.
При скалярном управлении двигателем токи статора не контролируются напрямую.
Процесс скалярного управления синхронным двигателем с постоянными магнитами может легко стать неуправляемым (выйти из синхронного состояния), особенно когда момент нагрузки превышает предельный момент привода. Скалярный метод не подходит для управления синхронным двигателем при низкой скорости и высоких динамических нагрузках.
метод метод скалярного управления относительно проста в реализации, но имеет несколько существенных недостатков:
— Во-первых, если не установлен датчик скорости, скорость вращения вала асинхронного двигателя невозможно контролировать, поскольку она зависит от нагрузки (наличие датчика скорости решает эту проблему), а в случае синхронного двигателя при изменении нагрузки можно полностью потерять контроль;
— Во-вторых, невозможно контролировать крутящий момент. Конечно, эту проблему можно решить с помощью датчика крутящего момента, но стоимость его установки очень высока и, вероятно, будет дороже самого привода. В этом случае управление моментом будет очень инерционным;
— Также невозможно одновременно управлять крутящим моментом и скоростью.
Скалярное управление достаточно для большинства применений, где привод используется с диапазоном регулирования скорости двигателя до 1:10.
Когда требуется максимальная скорость, широкий диапазон скоростей и управление моментом двигателя, используется векторное управление.
ВЕКТОРНЫЙ КОНТРОЛЬ
Векторный контроль — это метод управления бесщеточными двигателями переменного тока, который позволяет независимо и практически безынерционно управлять скоростью и моментом на валу двигателя.
Основная идея векторное управление является управление не только величиной и частотой питающего напряжения, но и фазой. Другими словами, контролируется величина и угол пространственного вектора. Векторное управление имеет более высокую эффективность, чем скалярное. Векторное управление позволяет избежать почти всех недостатков скалярного управления.
Векторное управление без обратной связи
Векторное управление без обратной связи используется для более широкого и динамичного управления скоростью электрической машины. При работе через частотный преобразователь электродвигатели могут развивать 200% номинального крутящего момента при частоте всего 0,3 Гц. Это значительно расширяет диапазон применений, в которых могут использоваться асинхронные электроприводы с векторным управлением. Этот метод также позволяет контролировать крутящий момент машины во всех четырех квадрантах.
Крутящий момент ограничен двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продуктов. Значение крутящего момента делится на четыре различных квадранта в зависимости от направления вращения электрической машины (вперед или назад) и в зависимости от того, осуществляет ли двигатель рекуперативное торможение. Пределы могут быть установлены для каждого квадранта отдельно или пользователь может установить общий крутящий момент в частотном преобразователе.
Двигатель будет работать в асинхронном режиме при условии, что магнитное поле ротора заторможено по отношению к магнитному полю статора. Если магнитное поле ротора начинает отставать от магнитного поля статора, то машина переходит в режим рекуперативного торможения с рассеиванием энергии, или, проще говоря, асинхронный двигатель переходит в режим генератора.
Например, машина для укупорки бутылок может использовать ограничитель крутящего момента в квадранте 1 (направление вперед с положительным крутящим моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм создает поступательное движение и использует положительный крутящий момент для завинчивания колпачка. Однако такое устройство, как домкрат, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный крутящий момент). Если автомобиль поднимается на верхний этаж, крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и предотвращения свободного падения противовеса, так как он тяжелее кабины.
Обратная связь по току в этих инверторах позволяет установить предельные значения крутящего момента и тока двигателя, поскольку крутящий момент увеличивается при увеличении тока. Выходное напряжение преобразователя частоты может быть увеличено, если машине требуется больший крутящий момент, или уменьшено, если достигнут предел крутящего момента. Это делает принцип векторного управления для асинхронных машин более гибким и динамичным, чем принцип U/F.
Инверторы с векторным управлением в разомкнутом контуре также имеют более быстрый отклик на скорость 10 Гц, что делает их пригодными для использования в машинах с ударными нагрузками. В камнедробилках, например, нагрузка постоянно меняется и зависит от объема и размера перерабатываемой породы.
В отличие от схемы управления U/F, векторное управление использует векторный алгоритм для определения наиболее эффективного напряжения двигателя.
Векторное управление ВУ решает эту проблему, обеспечивая обратную связь по току двигателя. Как правило, обратная связь по току обеспечивается внутренними трансформаторами тока в самом преобразователе частоты. Преобразователь частоты рассчитывает крутящий момент и поток электрической машины на основе полученного значения тока. Основной вектор тока двигателя математически делится на вектор намагничивающего тока и вектор момента.
На основе данных и параметров электрической машины преобразователь частоты рассчитывает векторы намагничивания и крутящего момента. Для достижения максимальной эффективности преобразователь частоты должен поддерживать эти векторы разведенными на угол 90 0 . Это важно, поскольку sin 90 0 = 1, а значение 1 представляет собой максимальное значение крутящего момента.
В целом, векторное управление асинхронным двигателем обеспечивает более жесткое управление. Регулирование скорости составляет приблизительно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет поддерживать крутящий момент на низких скоростях.
Векторное управление с обратной связью
Векторное управление с замкнутым контуром использует тот же алгоритм управления, что и векторное управление с разомкнутым контуром. Основным отличием является наличие энкодера, который позволяет ЧРП развивать 200% пускового момента при 0 об/мин. Эта точка просто необходима для развития начального крутящего момента при перемещении кранов, вышек и других подъемных механизмов, чтобы предотвратить провисание груза.
Наличие преобразователя с обратной связью по скорости позволяет увеличить время отклика системы за пределы 50 Гц и расширить диапазон регулирования скорости до 1:1500. Это также позволяет регулировать крутящий момент, а не скорость электрической машины. В некоторых машинах значение крутящего момента имеет большое значение. Например, намоточные машины, укупорочные механизмы и другие. В таких машинах необходимо контролировать крутящий момент машины.
Преимущества борьбы с векторами:
— Высокая точность регулирования скорости;
— Плавный пуск и плавное вращение двигателя во всем диапазоне частот;
— Быстрая реакция на изменение нагрузки: при изменении нагрузки скорость практически не меняется;
— Увеличенный диапазон регулирования и точность регулирования;
— Снижаются потери тепла и намагниченности, повышается КПД двигателя.
Рисунок 8: Структура управления векторным датчиком для трехфазной синхронной машины
Типы датчиков положения

Рисунок 11: Работа датчика положения с эффектом Холла для трехфазной машины и экстраполяция его сигнала
Часто в серводвигателях используется комбинация энкодера и датчика Холла. В этом случае можно сделать один программный модуль для их обработки, устранив недостатки обоих: это экстраполяция угла, показанная выше, но не по времени, а по символам с энкодера. Т.е. энкодер проходит внутри датчика Холла от края до края, и каждый край датчика Холла четко инициализирует текущее абсолютное угловое положение. В этом случае только первое движение привода будет неоптимальным (не ниже 90°), прежде чем он достигнет края датчика Холла. Отдельной проблемой в этом случае является обработка неидеальности обоих датчиков — симметрично и равномерно расположенные элементы Холла редко доступны…
Еще более дорогие приложения используют абсолютный энкодер с цифровым интерфейсом (абсолютный энкодер), который сразу выдает абсолютное положение и позволяет избежать описанных выше проблем.
Если двигатель очень горячий, или если требуется повышенная точность угла, «аналог» селсинхронный кодер (резольвер, поворотный трансформатор). Это небольшая электрическая машина, используемая в качестве датчика. Представьте, что синхронная машина, которую мы изучали на рисунке 1, вместо магнитов имеет другую катушку, на которую мы подаем высокочастотный сигнал. Если ротор стоит горизонтально, сигнал будет подаваться только на фазную катушку статора. αЕсли вертикально, то только для того, чтобы βЕсли его повернуть на 180, фаза сигнала изменится, и в промежуточных положениях он будет подаваться и туда, и сюда по закону синусоиды. Поэтому, измеряя амплитуду сигнала в обеих катушках, положение можно также определить по соотношению этой амплитуды и сдвига фаз. Установив такую машину в качестве датчика на основной датчик, можно узнать положение ротора.
Существует множество более экзотических датчиков положения, особенно для сверхточных применений, таких как производство электронных микросхем. Никаких физических явлений там не происходит, просто нужно как можно точнее определить положение. Мы не будем принимать их во внимание.Поэтому векторный контроль дает следующие преимущества. Точное управление скоростью вращения ротора (без датчика скорости на роторе) даже при динамически изменяющейся нагрузке на вал, без рывков. Плавное и равномерное вращение вала на низких скоростях. Высокая эффективность благодаря низким потерям при оптимизированных условиях напряжения питания.
Скалярное и векторное управление асинхронными двигателями — в чем различия?
Асинхронный двигатель — это двигатель переменного тока, в котором токи в обмотках статора создают вращающееся магнитное поле. Это магнитное поле индуцирует токи в обмотках ротора и, воздействуя на эти токи, приводит ротор в движение.
Однако для того, чтобы вращающийся ротор мог индуцировать токи в магнитном поле вращающегося статора, ротор должен немного отставать в своем вращении от поля вращающегося статора. Поэтому в асинхронном двигателе скорость вращения ротора всегда немного меньше скорости вращения магнитного поля (которая определяется частотой переменного тока, питающего двигатель).
Задержка ротора относительно вращающегося магнитного поля статора (скольжение ротора) тем больше, чем больше нагрузка на двигатель. Отсутствие синхронности между вращением ротора и магнитным полем статора является характерной чертой асинхронного двигателя, из-за чего он и получил свое название.
Вращающееся магнитное поле в статоре создается с помощью обмоток, питаемых фазосдвигающими токами. Для этой цели обычно используется трехфазный переменный ток. Существуют также однофазные асинхронные двигатели, в которых сдвиг фаз между токами обмоток создается путем включения в обмотки различных реактивных сопротивлений.
Векторное или скалярное управление приводом используется для управления угловой скоростью ротора и моментом на валу современных бесщеточных двигателей.
Наиболее распространенными из них являются Скалярное управление двигателем является наиболее широко используемым методом управления асинхронными двигателями.В этом случае для управления скоростью вентилятора или насоса достаточно поддерживать постоянную скорость вращения ротора, например, с помощью сигнала обратной связи от датчика давления или скорости.
Принцип работы скалярного управления прост: Амплитуда напряжения питания является функцией частоты, а отношение напряжения к частоте оказывается приблизительно постоянным.
Точная форма этой зависимости зависит от нагрузки на валу, но принцип остается тем же: частота увеличивается, а напряжение растет пропорционально характеристикам нагрузки рассматриваемого двигателя.
В результате магнитный поток в зазоре между ротором и статором поддерживается почти постоянным. Если отношение напряжения к частоте отклоняется от номинального значения двигателя, двигатель испытывает избыточное или недостаточное возбуждение, что приводит к потерям в двигателе и нарушениям в рабочем процессе.

Поэтому скалярное управление позволяет достичь почти постоянного крутящего момента в рабочем диапазоне независимо от частоты, но крутящий момент все равно снижается на низких скоростях (чтобы избежать этого, необходимо увеличить отношение напряжения к частоте), поэтому для каждого двигателя существует вполне определенный рабочий диапазон скалярного управления.
Кроме того, невозможно построить скалярную систему управления скоростью без установленного на валу датчика скорости, поскольку нагрузка сильно влияет на отставание фактической скорости ротора от частоты питающего напряжения. Однако даже при наличии датчика скорости при скалярном управлении точное регулирование крутящего момента невозможно (по крайней мере, экономически).
Эти недостатки скалярного управления объясняют относительно небольшое число его применений, которые в основном ограничены обычными асинхронными двигателями, в которых зависимость скольжения от нагрузки не является критичной.

Чтобы избавиться от этих недостатков, еще в 1971 году инженеры Siemens предложили использовать векторное управление для управления двигателем, где управление основано на обратной связи по магнитному потоку. Первые системы векторного управления включали в себя датчики потока в двигателе.
Сегодня подход к этому методу несколько иной: математическая модель двигателя рассчитывает скорость вращения ротора и крутящий момент вала в зависимости от текущих фазных токов (от частоты и величины токов в обмотках статора).
Этот более продвинутый подход позволяет независимо и практически безынерционно управлять как моментом, так и скоростью вращения вала под нагрузкой, поскольку фаза токов также учитывается в процессе управления.
Некоторые из более точных систем векторного управления оснащены цепями обратной связи по скорости, а системы управления без датчиков скорости называются бессенсорными.
Таким образом, в зависимости от применения конкретного привода, его система векторного управления будет иметь свою специфику, свою степень точности управления.
Если требования к точности скорости допускают отклонение до 1,5%, а диапазон регулирования составляет менее 1 к 100, то подойдет система без датчиков. Однако если требуется точность регулирования скорости с отклонением 0,2% или менее, а диапазон ограничен 1 к 10 000, то необходима обратная связь от датчика скорости вращения вала. Наличие датчика скорости в системах векторного управления позволяет точно регулировать крутящий момент даже при низких частотах порядка 1 Гц.

Таким образом, векторное управление обеспечивает следующие преимущества. Точное управление скоростью вращения ротора (без датчика скорости на роторе) даже в условиях динамически изменяющейся нагрузки на вал, без рывков. Плавное и равномерное вращение вала на низких скоростях. Высокая эффективность благодаря низким потерям при оптимальных условиях напряжения питания.
Векторный контроль не лишен недостатков. Сложность вычислительных операций. Необходимость установки начальных данных (параметров управляемого привода).
Векторное управление не подходит для групповых приводов, лучше использовать скалярное управление.
Если вам понравилась эта статья, пожалуйста, поделитесь ею в своих социальных сетях. Это очень поможет в развитии нашего сайта!
Скалярии не контролируют крутящий момент, для этой цели можно отдельно установить датчик крутящего момента. Также в «скалярах» невозможно одновременно управлять моментом и скоростью.
Разница между скалярными и векторными переменными
Скалярный метод различается по контролируемому объекту, областям применения и технологическим характеристикам. Скалярные методы используются в насосах, вентиляторах, конвейерах, различных приводах, мельницах, упаковочных машинах.
- удобство и простота использования, регулировка механизмов;
- уменьшение количества вспомогательных приводных агрегатов;
- автоматизация производства, возможен контроль днем и ночью;
- более высокая производительность машины — контроль позиционирования, скорости, частоты;
- способность плавно запускать и останавливать машины.
Разница между этими двумя методами также заключается в предмете контроля и мониторинга. В случае «скалярного» двигателя это магнитное поле статора, в то время как в случае векторного двигателя EF взаимодействуют магнитные поля статора и ротора. Такое взаимодействие оптимизирует крутящий момент на разных скоростях.
Скалярный» инвертор использует выходную частоту и ток, «векторный» — выходную частоту, ток и его фазу.
Скалярии не контролируют крутящий момент; для этой цели можно отдельно установить датчик крутящего момента. Также невозможно управлять моментом и скоростью в скалярах.
Несмотря на перечисленные выше преимущества векторов, многие клиенты часто выбирают между векторным и скалярным управлением. Почему?
- Цена векторного контроля значительно выше, чем скалярного.
- Установка и обслуживание скалярного инвертора дешевле и понятнее, чем «векторного».
- Скалярный» может управлять несколькими двигателями одновременно, тогда как «векторный» — нет.
- При использовании «векторного блока» скорость изменяется больше при постоянной нагрузке.
Поэтому перед покупкой необходимо определить характеристики устройств, которыми будет управлять преобразователь частоты.

- Шаговые двигатели: свойства и практические схемы управления. Часть 2.
- Рабочие характеристики асинхронного двигателя; Школа для электриков: электротехника и электроника.
- Векторное управление вентильным двигателем в безредукторном сервоприводе — темы научных работ по электротехнике, электронике, информатике читайте бесплатно тексты научных работ в электронной библиотеке КиберЛенинка.
- Асинхронный электродвигатель — конструкция, принцип работы, типы асинхронных двигателей.
- Как работают энкодеры, как они устроены и как функционируют.
- Принцип работы синхронного двигателя.
- Селсин. Что такое селсин?.