— Каковы планы компании GCS по внедрению промышленных роботов?
«Промышленные роботы — ключевое звено в экосистеме цифрового предприятия»

— Согласно исследованию Национальной ассоциации участников рынка робототехники (НАУРР) и Министерства промышленности и торговли РФ, в 2018 году рынок в России вырос на 42%, при этом в компаниях было установлено более 1000 роботов по сравнению с чуть более 700 в 2017 году. Однако плотность роботов остается довольно низкой — шесть роботов на 10 000 сотрудников.
По оценкам KUKA и Ассоциации промышленной робототехники, к 2022 году темпы внедрения роботов в мире возрастут до 524 000 новых роботов в год.
Лидером по количеству установленных промышленных роботов по отношению к числу сотрудников является Сингапур (918 роботов на 10 000 сотрудников). работников), Южной Кореи (868 роботов) и Японии (364 робота). Германия занимает четвертое место с 346 роботами и является крупнейшим потребителем промышленных роботов в Европе. Китай занимает 15-е место с показателем 187 роботов на 10 000 работников, но китайский рынок является одним из самых быстрорастущих.
Указанные страны также являются крупными экспортерами промышленных роботов, причем на долю Японии приходится 47% мирового производства роботов. Китай занимает второе место по производству роботов. Собственное производство ускоряет роботизацию, позволяет измерить ее эффект и преодолеть нормативные и технологические барьеры. Поддержка автоматизации производства обычно осуществляется на государственном уровне.
— Каковы планы SCS в отношении промышленных роботов?
— ГКС поддерживает тенденцию автоматизации производства в России и обладает компетенциями от постановки задач, проведения исследований, проектирования роботизированных ячеек и моделирования производственного цикла до поставки и монтажа оборудования, внедрения инженерной и IT-инфраструктуры и запуска производства с последующей комплексной поддержкой всей инфраструктуры.
Вместе с нашим технологическим партнером, производителем роботов KUKA, мы уже внедрили роботизированные системы в ряде российских компаний и видим растущий интерес к этим технологиям в промышленности, включая вертикально интегрированные компании Росатом, Ростех и Роскосмос.
Для ускорения темпов роботизации российской промышленности необходима комплексная программа государственной поддержки, стимулирующая внедрение роботов в производственный цикл.
Развитие отрасли также потребует подготовки квалифицированных кадров. Не хватает около 19 000 работников. К 2025 году этот спрос возрастет до 40 000. Образовательные учреждения должны быть вовлечены во внедрение роботов, например, путем создания лабораторий роботов в университетах. А на производственных предприятиях в этот процесс должны быть активно вовлечены руководители среднего звена и технический персонал.
SCS и KUKA, например, проводят открытые вебинары и семинары по робототехнике, предоставляют информацию о возможностях применения промышленных роботов в различных отраслях промышленности, проводят консультации для заинтересованных компаний и организуют демонстрации с участием роботов, демонстрирующих различные функции. Следующий семинар под названием «Оцифровка промышленности: робототехника и робототехника» состоится 28 апреля. Он будет включать демонстрацию робота в действии и практическое управление роботом.
— Ускорит ли пандемия роботизацию производства?
— Да, возникла необходимость минимизировать зависимость производственного процесса от работника. В частности, трудовая миграция резко сократилась из-за глобальных ограничений на поездки, что повлияло на темпы производства.
Помимо прочего, компании хотят защитить себя от возможных новых волн вспышек. За последние 7-8 месяцев в SCS поступает все больше запросов на проведение аудита объектов с целью определения целесообразности внедрения промышленных роботов.
— Какие отрасли имеют наибольший потенциал для роботизации сегодня?
— Ускорение перехода на отечественное программное обеспечение и ИТ-оборудование потребует быстрого роста производства в электронной промышленности. На примере завода электроники и IT-оборудования «Аквариус» мы понимаем, что без роботизации будет крайне сложно конкурировать на рынке.
Пищевая промышленность также имеет большой потенциал для роботизации: высокая конкуренция заставляет производителей оптимизировать производственные затраты. Использование роботов в нужной области процесса (например, при массовом производстве однотипной продукции) обеспечивает преимущество на рынке и реальную экономию.
Традиционно автомобильная промышленность является лидером в области роботизированных решений. Как правило, иностранные автопроизводители при локализации производства покупают целую производственную линию, оснащенную роботами. Благодаря такому подходу мы видим возможность для предоставления услуг роботов.
Наименее роботизированными отраслями, по нашему мнению, являются аэрокосмическая промышленность и судостроение. Для нас эти области представляют интерес и даже своего рода профессиональный вызов.
— Какова производительность роботов?
— Ассортимент роботов KUKA включает роботы с грузоподъемностью от 5 до 1 300 кг. Производительность робота может быть рассчитана в зависимости от его модели и области применения.
Существует мнение, что внедрение промышленной робототехники не будет прибыльным. Это неправда. Современные промышленные роботы быстро автоматизируют вторичные процессы — обработку изделий, упаковку и штабелирование, маркировку, контроль качества — такие роботы могут окупить себя менее чем за год.
Самое главное, внедрение роботов приводит к сокращению времени производства, повышению производительности, улучшению качества и постоянства (брак сокращается вдвое и более) и снижению эксплуатационных расходов.
Например, в прошлом году мы сделали такой расчет для владельца деревообрабатывающего предприятия. В связи с пандемией компания потеряла часть сотрудников. В частности, необходимо было обеспечить паллетизацию ДСП. Расчеты показали, что внедрение погрузочного робота окупится в течение полутора лет. В результате владелец установил промышленного робота и планирует увеличить роботизацию процессов.
Робот повышает безопасность труда и снижает зависимость производства от влияния человека: он не болеет, не берет выходных и не уходит в отпуск.
Стоимость приобретения и установки роботов снижается с каждым десятилетием. В период с 2005 по 2014 год стоимость внедрения робототехники снизилась почти на 30%, а к 2025 году ожидается дальнейшее снижение на 22%. Роботы становятся все проще в управлении и программировании, что делает их использование доступным не только для крупных компаний, но и для малого и среднего бизнеса.
— Как роботы вписываются в производственную и коммерческую схему компании?
— Невозможно спланировать и обеспечить эффективность интеграции робота в конкретную технологическую цепочку, не находясь на месте и не погрузившись в производственный процесс. Мы должны знать место, условия для установки робота и подготовить инфраструктуру, которая потребуется для его внедрения. Все это мы объясняем во время технологического аудита. Затем составляется объем задач и определяются KPI.
После выбора места и проектирования роботизированной камеры мы дополнительно проводим компьютерное моделирование работы робота и проверяем в интерактивной 3D-модели, как он впишется в рабочий процесс и само помещение. 3D часто выявляет нюансы, которые трудно предсказать в 2D-модели.
Моделирование и проектирование осуществляется на базе семейства программного обеспечения KUKA. Вместе с машинами мы поставляем программное обеспечение, позволяющее перепрограммировать робота для выполнения другой задачи, и обучаем программированию технических специалистов заказчика. Сами роботы универсальны: один робот может использоваться на разных участках технологического процесса путем замены принадлежностей.
— Как меняется информационная безопасность в промышленности?
— Это один из ключевых аспектов при планировании автоматизации любого бизнеса. Информационная атака на автоматизированную систему управления может привести к аварии и нанести ущерб имуществу, жизни и здоровью граждан.
Автоматизированная система управления должна быть защищена как на физическом, так и на информационном уровне. Центр передового опыта SCS по информационной безопасности имеет опыт и разрабатывает решения для каждого клиента в соответствии с положениями ФЗ-183, тем более что большинство наших промышленных партнеров имеют объекты, связанные с критической информационной инфраструктурой.
Особый интерес представляют универсальные роботы, которые в силу своего назначения являются наиболее адаптивными системами управления.
Роботы в промышленности — типы и разновидности

Это статья о промышленном применении робототехники. Исторически использование роботов в промышленности началось чуть более полувека назад, но сегодня мало какое производство обходится без автоматизированных линий, стальных манипуляторов и острых стеклянных глаз роботов — «железные парни» прочно вошли в большинство производственных процессов и не собираются уходить.

Несмотря на то, что роботы настолько распространены и почти повсеместно используются, только специалисты знают весь спектр их возможностей. В этой статье мы откроем дверь в мир промышленной робототехники для широкой аудитории, описав некоторые из различных типов промышленных роботов и их применение. Невозможно охватить весь этот простор в одной статье, но если читатели заинтересуются, мы обязательно продолжим.
Так что же такое роботы?
Существует несколько классификаций промышленных роботов: по типу управления, степени подвижности, применению и выполняемым операциям.
По типу управления:
Управляемые роботы: требуют, чтобы оператор контролировал каждое их движение. Они не получили широкого распространения из-за узкого спектра применения. Они также не совсем роботы.
Автоматические и полуавтономные роботы: работают строго по заданной программе, часто не имеют датчиков, не могут корректировать свои действия и не могут обойтись без работника.
Автономные: могут выполнять запрограммированный цикл действий без вмешательства человека, следуя заранее заданным алгоритмам и корректируя свои действия при необходимости. Они могут охватить весь спектр применений на своей сборочной линии без необходимости вмешательства человека.
По функциям и применению:
Роботы делятся по назначению и функциям, вот лишь некоторые из них: промышленные роботы могут быть многоцелевыми, сварочными, инженерными, режущими, собирающими, упаковочными, хранящими, окрашивающими.
Это далеко не полный список: количество всевозможных вариантов постоянно растет, и перечислить их все в одной статье невозможно. Единственное, что можно сказать с уверенностью, — это то, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, выполняя все монотонные и опасные части работы самостоятельно.
Другие методы классификации
Каждая энциклопедия, каждый учебник и каждый производитель имеет свою классификацию и типологию роботов. Неудивительно, что она часто зависит от строго определенных потребностей и особого подхода того, кто ее разрабатывает.
Мешает ли это нам посмотреть на некоторые модели и понять их возможности? Конечно, нет. Отпустите нас.
Давайте рассмотрим несколько примеров
Наиболее известными из этих промышленных роботов являются роботы компаний Kuka, Fanuc и Universal Robots, некоторые из которых мы рассмотрим более подробно ниже.

KUKA KR QUANTEC PA — один из лучших роботов для паллетирования на рынке. KUKA KR QUANTEC PA Arctic — его модификация — робот, работающий при экстремально низких температурах. В первую очередь он предназначен для работы в морозильных камерах при температуре до -30 °C. Электронные и механические части устройства не требуют защиты от мороза, снега и инея и не выделяют чрезмерного тепла. Как и стандартный KUKA KR QUANTEC PA, арктическая версия имеет вылет 3195 мм и грузоподъемность до 240 кг. Устройство идеально подходит для использования в пищевой промышленности и в экстремальных северных условиях. Помимо штабелирования поддонов, робот может выполнять и другие операции, поскольку точность его перемещения, а точнее повторяемость позиционирования, составляет 0,06 мм.

FANUC M-2000iA/1200 — Пятиосевой робот-манипулятор, способный поднимать до 1200 кг и переносить грузы высотой до 3,7 м, идеально подходит для работы с материалами, поскольку работает без участия человека, практически исключая риск получения травмы. Работает при температурах от 0°C до +45°C. Повторяемость 0,03 мм.
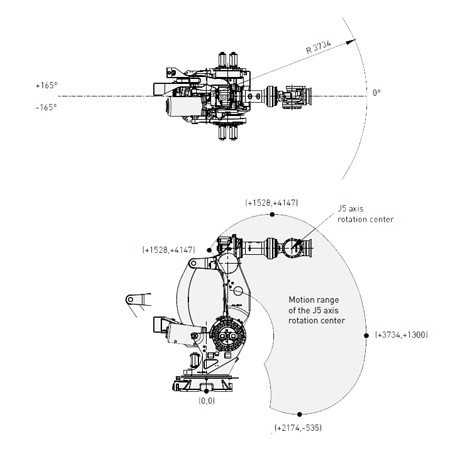
Исключительная прочность.
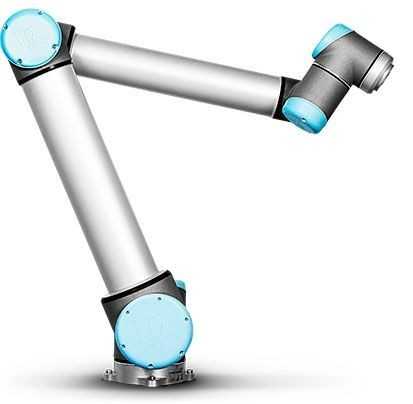
UR10 — это самый крупный из универсальных роботов и является коллаборативным роботом, проще говоря — он предназначен для работы с другими машинами и помогает выполнять работу людей.
UR10 имеет радиус действия 1,3 метра и может поднимать до 10 килограммов. Он может использоваться с сельскохозяйственным, фармацевтическим, перерабатывающим оборудованием и многим другим. Компактно размещаясь на рабочем месте мужчины и становясь его «третьей рукой», он легко программируется и быстро настраивается.
UR10 может прикручивать, клеить, сваривать и паять, лить и собирать.
Универсальные роботы также используются на принадлежащей корпорации Medium фабрике Voodoo Manufacturing: Project Skywalker, занимающейся 3D-печатью, где многие операции выполняют роботы-манипуляторы. Такие действия, как смена печатных платформ, сбор и хранение готовой продукции, больше не требуют неустанного внимания персонала.
Универсальные роботы представляют особый интерес, поскольку они предназначены для наиболее адаптивных систем управления.
Rethinkrobotics
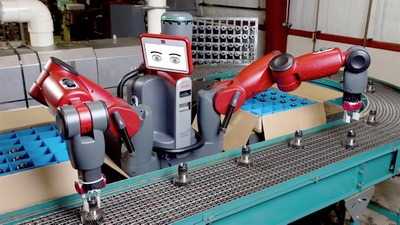
К ним относятся такие роботы, как Бакстер и Сойер от компании Rethinkrobotics.
Бакстер — Многофункциональный робот с двумя руками и системами обратной связи и обучения.

Его 7-осевые манипуляторы способны практически на все, что может сделать человеческая рука, включая обратную связь и управление силой. Это и особенности конструкции делают Baxter безопасным для живых рабочих — его рабочую зону не нужно огораживать, и он не занимает много места, экономя пространство в мастерской. Пара Бакстеров может хорошо работать вместе.

Бакстер также интересен тем, что не требует детального программирования каждого своего действия — его можно «обучить» не только с помощью интуитивно понятного визуального приложения, но и на рабочем столе — повторяя показанные движения, он запоминает их и использует в будущем.
Сойер — Младший брат» Бакстера — удивительно компактный и легкий робот, который весит всего 19 килограммов и может быть размещен практически в любом месте, не занимая много места.
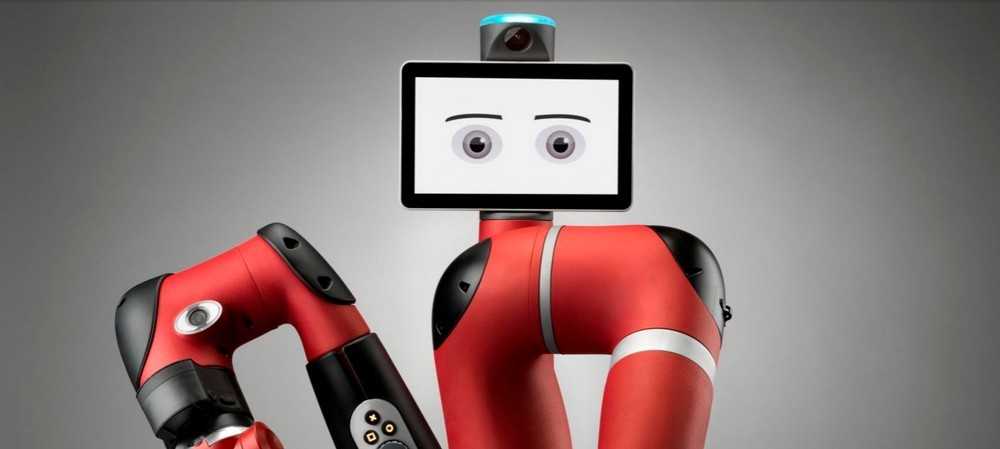
Sawyer имеет точность до 0,1 мм, что позволяет использовать его в сотнях случаев комплектации, сборки и других конвейерных приложений.
Оба робота могут быть легко обучены новым функциям, даже без традиционного программирования, и так же легко могут быть перемещены с одного рабочего места на другое.
Гибридное производство
Компания Stratasys применила очень интересный подход, создав новый тип промышленной машины — гибрид между роботом и 3D-принтером.

Конечно, любой 3D-принтер имеет атрибуты робота, но здесь речь идет о совершенно традиционной форме роботизированной руки, в том числе и той, которая печатает по технологии FDM. 3D-демонстратор Stratasys Infinite-Build предназначен в первую очередь для аэрокосмического производства, где его способность печатать на вертикальных поверхностях неограниченной площади так важна, в соответствии с концепцией infinite-build. Такие монстры, как аэрокосмический гигант Boeing и автомобильный гигант Ford, были связаны с работой над проектом, предоставляя Stratasys спецификации требуемых характеристик получаемых изделий.

Восьмиосевой механизм манипулятора, обилие специально разработанных композитных материалов для печати и традиционно высокое качество сборки говорят нам о том, что у этой машины и ее потомков большое будущее.

Рисунок 4 3D Systems — это модульная роботизированная система для автоматизации стереолитографической 3D-печати, не больше, не меньше.

Это целая автоматизированная система, способная производить новые изделия каждые несколько минут — в отличие от нескольких часов для обычных SLS-принтеров.

Кроме того, цикл уже включает такие этапы, как промывка, отделение праймера и дозирование, а не только первоначальное экспонирование. На рисунке 4 все эти этапы выполняются самостоятельно, без вмешательства оператора в процесс.
Благодаря своей модульности, рисунок 4 может быть использован для создания достаточно больших автоматических линий с использованием стандартных компонентов.
Комплекс был представлен публике в этом году на Международной стоматологической выставке в Кельне, как и новый 3D-принтер ProJet. CJP 260Plus — полноцветный 3D-принтер для анатомического моделирования медицинских устройств и быстрого прототипирования любых промышленных образцов.


Принтер также роботизирован — оснащен системой автоматической загрузки, удаления и обработки печатного порошка.
Можно с уверенностью сказать, что интегрированный подход к 3D-печати является частью производственной культуры будущего. Он обеспечит радикально новое сочетание скорости, точности, удобства и более низких производственных затрат.

Carbon SpeedCell — это технологическое решение компании Carbon, включающее новый 3D-принтер The M2, работающий по технологии CLIP, и финишер для стереолитографии Smart Part Washer.

CLIP — это технология бесслойной стереолитографической печати, обеспечивающая в 25-100 раз большую скорость по сравнению с обычным SLS и новый уровень качества поверхности.
Система CLIP (Continuous Liquid Interface Production) позволяет получать ранее невозможные формы продукта с минимальной последующей обработкой. Производитель еще не объявил точную спецификацию аппаратного комплекса, но сам подход уже заслуживает одобрения — это практически готовое решение для любой мастерской, где требуется стереолитографическая печать.

Машина, сочетающая в себе несколько различных подходов к обработке деталей: это классический фрезерный станок с программным управлением — пятиосевой и очень точный, лазерный резак с теми же степенями свободы, а также 3D-принтер, печатающий из металла с помощью технологии лазерного напыления. Трудно представить себе операцию, которую эта машина не могла бы выполнить с металлическим компонентом. Гибридный подход: фрезерование заготовки, наплавка недостающих деталей или печать с нуля и финишная обработка — все операции могут быть выполнены на заготовке за один проход, в одной предустановленной программе, без прерывания рабочего процесса. Размер обрабатываемых и/или печатаемых деталей составляет до 600 на 400 мм, а вес может достигать 600 кг.
Такое металлическое многофункциональное устройство уже изменило культуру штучного и мелкосерийного производства, и в ближайшем будущем этот подход может быть распространен на серийное производство.
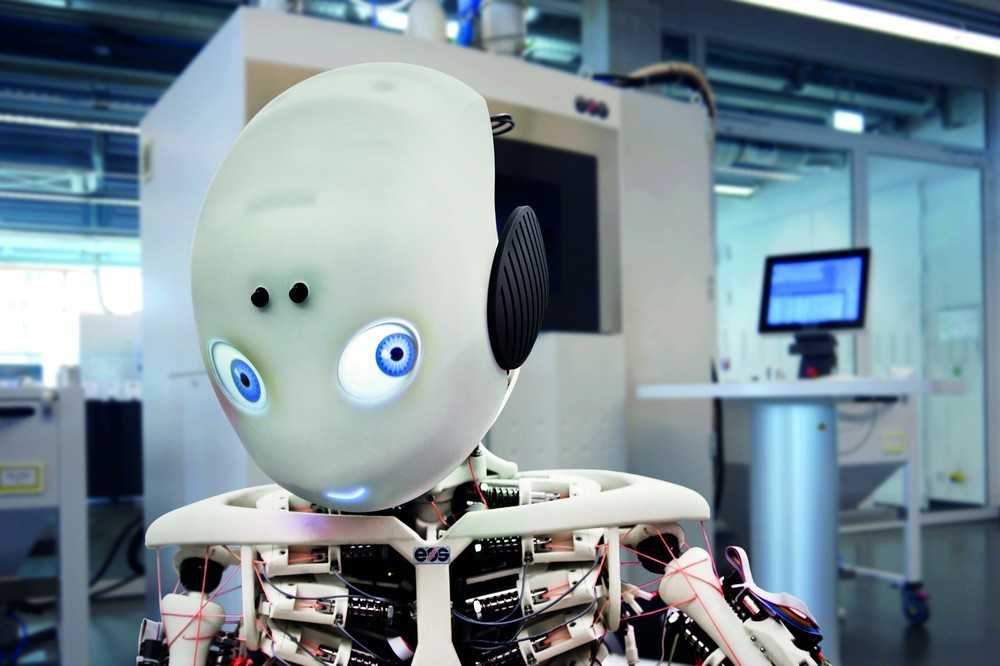
EOS — инкрементное производство

Компания EOS разработала манипуляторы, которые могут выполнять различные операции, требующие захвата и перемещения деталей. Разработки EOS в этой области основаны на наблюдениях за поведением животных, в частности, эта роботизированная рука создана по образцу хобота слона.
Этот роботизированный манипулятор может использоваться во многих промышленных приложениях, таких как обработка и упаковка и перемещение деталей с одного производственного участка на другой, например, с 3D-принтера на отделочную камеру, чтобы исключить участие человека на этом этапе.
Вот как это работает:
Компания также спонсирует и демонстрирует Roboy, мобильного робота-гуманоида, способного выполнять все человекоподобные движения и выступающего в качестве ассистента на производстве.

Известный производитель станков для 3D-печати металлов Concept Laser заключил соглашение со Swisslog. Их совместный проект — M Line Factory, система для передачи 3D-печатных металлических деталей между станками Concept Laser с помощью роботов Swisslog.
Компании продолжают работать над совершенствованием аппаратных комплексов для трехмерной печати металлов. Роботизированные компоненты этих машин способны провести деталь через весь цикл — от загрузки дизайна в память до доставки готового изделия на склад — без вмешательства оператора.

Эта единственная в своем роде машина представляет собой единую систему для печати, транспортировки и хранения готовых деталей. По сути, это целая мастерская по 3D-печати металла в одном корпусе.
Существуют роботы, которые могут выполнять функции сварочных аппаратов и фрезерных станков с помощью запрограммированного управления.
Есть и такие, которые работают на традиционных фрезерных станках с ЧПУ, повышая их производительность.
Например, вот как это делает вышеупомянутый Сойер:
Приложения
Роботы повсеместно распространены в современной промышленности. Они есть в каждом цехе и на каждом участке производства. И это нормально: роботы экономят деньги работодателей и работников, избавляя их от вредной и монотонной работы; роботы работают 24 часа в сутки 7 дней в неделю; роботы намного точнее живых работников — они не устают, их глаза не «замыливаются», их датчики и системы позиционирования могут быть точными до сотых долей миллиметра.
Пока мы видим их не везде — многие производственные процессы скрыты от обычного пользователя и, как правило, не очень интересны, — но скоро будет невозможно не заметить, что подавляющее большинство материальных благ производится умными машинами.
Современные машины ПМ оснащены системой датчиков, способных обеспечивать обратную связь. Когда условия окружающей среды меняются (например, размер или положение объекта), датчики обнаруживают расхождение с программой и предоставляют фактические данные.
Функции ровера: Как они работают

Современные ВП могут использоваться для перемещения или удержания объектов или для производственных процессов. Необходимые движения выполняются манипулятором. Его часто сравнивают с человеческой рукой, поэтому его форма часто похожа. Движения манипулятора делятся на 2 этапа: захват (по аналогии с рукой) и перемещение (плечевой и плечевой суставы) объекта или инструмента. Для этого в суставах выполняются как поступательные, так и вращательные движения.
Алгоритм работы робота определяется программным обеспечением. Он состоит из нескольких характерных этапов:
- Определение местоположения нужного объекта (детали) в пространстве и перемещение инструмента к нему. В стационарной установке движется только рука. В случае транспортной функции робот перемещается сам.
- Захватите объект. Операционному устройству выдается команда.
- Переместить объект по заданной траектории и поместить его в рабочую область.
- Выполнение технологических операций (обработка заготовок, покраска, сварка, упаковка и т.д.).
- Извлечение готового компонента и удаление его из рабочей зоны. Переместите его в место хранения.
- Возврат манипулятора или всего робота в исходное положение.
Современные DF оснащены системой датчиков, которые могут обеспечивать обратную связь. При изменении условий окружающей среды (например, размера или положения объекта) датчики обнаруживают расхождение с программой и предоставляют фактические данные.
Важно! Интеллектуальные ПР способны принимать собственные решения и вносить коррективы в ПМ. Другие роботы передают информацию оператору, который вносит коррективы.
Он используется для загрузки материала в станки с ЧПУ, выгрузки готовых деталей, обслуживания станка — смазки, замены режущего инструмента или печатающих головок.
Типы промышленных роботов
Роботы классифицируются по множеству различных критериев: по выполняемым ими операциям, по полезной нагрузке, по управлению, по устройству и по техническим характеристикам. Робототехника развивается так быстро, что национальные стандарты не успевают за ней. Часто модели можно отнести более чем к одной категории.
Здесь мы проведем условное деление на основные типы.
Если вы хотите узнать больше о классификации роботов — следите за нашими обновлениями, скоро будет отдельная статья, подробно обсуждающая эту тему.
Специализированные роботы
Это роботы, которые выполняют определенный тип операций и функциональность которых структурно определена. К ним относятся сварочные роботы, роботы для сборки компонентов на электронных платах, медицинские роботы и т.д.
Роботы для паллетирования
Назначение этих роботов — укладка продукции на поддоны по заранее запрограммированной схеме и операции.

Роботы серии fanuc M410 подходят для средних и тяжелых грузов (до 700 кг).
Робот-сварщик

Роботы серии FANUC Arc Mate могут выполнять дуговую сварку, пайку и лазерную сварку.
Роботы для покраски

Два робота FANUC Paint в процессе покраски. Источник: nordrobotics.lt
Распылительные роботы успешно используются в самых разных отраслях промышленности — от производства потребительских товаров до строительства тяжелого машиностроения.
Роботы-манипуляторы
Традиционные

Обычные промышленные роботы — это роботизированные руки с сервоприводом и большим количеством степеней свободы, движения которых обычно ограничены их размерами и досягаемостью присоединенного к ним инструмента. Они могут вращаться вокруг основания и выдвигать инструмент под разными углами, создавая движения со сложными траекториями.
Полезен во многих областях — применение ограничено только тем, какие инструменты могут быть интегрированы в структуру.
Это могут быть захваты или пневматические присоски, используемые для перемещения предметов, погрузки и укладки на поддоны; сварочные аппараты или аппараты для 3D-печати, оборудование для распыления краски и многое другое.

Робот KUKA KR AGILUS выполняет нарезку резьбы на болтах и проверяет результат. Источник: kuka.com
Дельта-роботы

Роботы на основе дельта-механики часто выполняют упаковочные и сборочные работы на конвейерных лентах. Роботы такого типа предназначены для очень точного и быстрого перемещения. Эта конфигурация широко используется в пищевой, фармацевтической и электронной промышленности — они размещают электронные компоненты на печатных платах для пайки, заполняют упаковки мелкими деталями и выполняют другие операции, требующие одновременно точности и скорости.

На фото: дельта-роботы FANUC M-2iAs упаковывают бельгийские пластины. Источник: fanuc.eu
Роботы SCARA

Основанные на кинематической схеме SCARA, эти роботы обладают превосходной точностью и повторяемостью — выше, чем традиционные рычажные и дельтаобразные роботы — но, как правило, имеют меньше степеней свободы и гораздо меньший рабочий диапазон по конструктивным причинам.

Используется там, где важна точность и не требуется большая зона доступа — для подбора деталей, контроля качества, подбора и обработки компонентов.

На фото: Робот Epson Scara очень быстро сортирует мячи для гольфа.
Роботы для управления машинами

Роботы могут управлять одним станком или несколькими одновременно. Некоторые модели предназначены для монтажа сверху: они устанавливаются на рейку, под прямым углом к стене, или на линейную ось, к потолку. Это выгодно, когда производственные площади ограничены. Роботы могут перемещаться от станка к станку по рельсам. Роботы выпускаются в различных исполнениях в зависимости от рациональности использования той или иной машины на данном производственном участке.

Робот UR работает с токарным станком с ЧПУ, источник: CNC Programmer
Они используются для загрузки материала в станки с ЧПУ, выгрузки готовых деталей, обслуживания станков — смазки, замены режущих инструментов или печатающих головок.

Промышленный робот используется для управления станком с ЧПУ. Источник: cnc-machine-tools.com
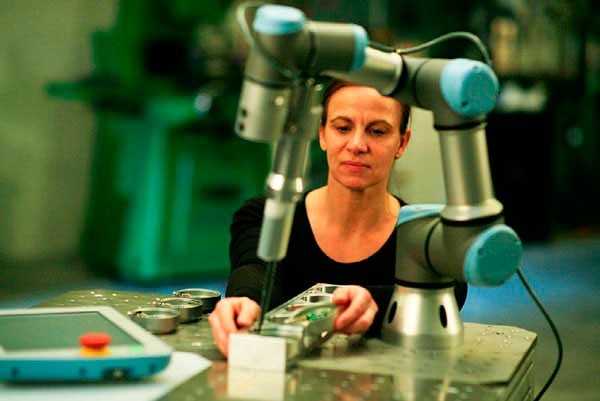
Совместные роботы

Коллаборативные роботы — коботы — работают в непосредственной близости от человека и вместе с ним. Их система обратной связи, основанная на различных датчиках и специальных алгоритмах работы, позволяет предотвратить столкновения движущихся частей робота с людьми и другими посторонними предметами, не предусмотренными программой.
Первоначально роботы были маленькими роботами-самопомощниками, как тот, что изображен на фото выше, но сегодня мы можем думать о любых роботах, которые работают в тесном контакте с человеком, не подвергая его опасности.
Узнайте больше о роботах совместной работы в нашей недавней статье «Робот совместной работы: Что это такое — определение и применение».
Заработная плата в России ниже, но и график работы более обширный — роботы могут работать 24 часа в сутки, 7 дней в неделю, 365 дней в году, 51 или 52 недели.
Промышленные роботы в России: примеры внедрения, расчет рентабельности инвестиций и перспективы роботизации
Производственные компании в России используют множество процессов, включая сварку, формовку, обработку на станках с ЧПУ, покраску, сборку и многие другие. Большинство этих операций по-прежнему выполняются людьми.
Многие виды работ, особенно те, которые связаны с монотонными и опасными задачами, известными как «три Д» робототехники (скучно, грязно и опасно), могут быть автоматизированы.
- движущиеся детали на сборочных линиях;
- сортировка и упаковка готовых деталей;
- сварка;
- подача материалов на сборочных линиях;
- контроль качества готовой продукции;
- техническое обслуживание станков с ЧПУ
- укладка на поддоны, погрузочно-разгрузочные работы
- нанесение лакокрасочных покрытий;
- режущие материалы и шлифовальные поверхности.
Одним из способов автоматизации производства является использование роботов, промышленных и совместных манипуляторов.
В 2019 году на долю роботов совместной работы пришлось 4,8% всех установленных в мире роботов — 355 000 обычных роботов и 18 000 коботов за один год.
Разнообразие возможных применений роботов позволяет автоматизировать большинство производственных процессов и снизить затраты в различных подразделениях компании. Например, установка всего двух роботов SCARA на предприятии по производству продуктов питания может снизить затраты на рабочую силу на 25% от первоначальной стоимости, что составляет $37 500 вместо $150 000 в год при работе три смены в день, шесть дней в неделю и 48 недель в году, утверждает американская компания TM Robotics.
Уровень заработной платы в России ниже, но и график работы более обширный — роботы могут работать 24 часа в сутки, семь дней в неделю, 365 дней в году, 51 или 52 недели.
Промышленные роботы максимально быстры и точны. Их высокая скорость делает их опасными для человека. Поэтому им необходимо специальное огороженное место или закрытый бокс. Эти два параметра также определяют их главное преимущество — более высокую производительность по сравнению с коботами.
Совместные роботы — коботы — специально разработаны так, чтобы не травмировать людей: они, как правило, имеют округлые формы, почти всегда имеют пониженную силу и скорость, а также встроенные системы безопасности. При срабатывании датчика касания робот немедленно останавливается.
Коллаборативные роботы также универсальны и многозадачны, имеют низкую стоимость и быстрый возврат инвестиций, просты в установке и интеграции, легко программируются, подходят как для крупных компаний, так и для малого бизнеса, потребляют меньше энергии, чем традиционные промышленные роботы, и занимают меньше места.
Короче говоря: роботы быстрее и точнее, коботы безопаснее и удобнее.
Как промышленные, так и коллаборативные роботы нужны не только для того, чтобы освободить работников от вредных и утомительных задач и избавить компанию от лишних затрат на персонал, но и для повышения производительности и сокращения отходов.
По данным NAURR (Национальной ассоциации маркетологов робототехники), роботы используются во всем мире в автомобилестроении (30%), электронике (25%), машиностроении (10%), химической, нефте- и газоперерабатывающей промышленности (5%), пищевой промышленности (3%), во многих других отраслях, не относящихся к этим сферам (9%), и в неизвестных целях (19%) — очевидно, включая аэрокосмическую и военную отрасли, которые так ценят секретность.
Промышленные роботы программируются специалистом — для этого требуется опытный робототехник, а сам процесс занимает некоторое время, что приводит к простоям, когда робот перепрофилируется с одного участка на другой. Перемещение робота относительно просто по сравнению со стационарными устройствами.
Коботов легче программировать. Они предназначены для обучения, когда оператор перемещает руку робота, а робот запоминает, что он сделал, и затем повторяет то же самое. Это облегчает программирование совместных машин, а также их перенастройку в случае изменения задачи.
Одной из наиболее перспективных областей для автоматизации ручного труда является загрузка и разгрузка станков с ЧПУ. Установка заготовки в станок, извлечение обработанной готовой детали и замена режущего инструмента — простые задачи, не требующие инженерного образования. Их может выполнять робот вместо человека, что гораздо эффективнее и экономичнее.
Роботы обычно используются с машинами, выполняющими эти операции:
- фрезерование,
- поворот,
- нарезка,
- изгиб,
- формовка,
- литье под давлением,
- 3D-печать.
Обычно при работе с машинами роботы загружают детали в машины и выгружают обработанные детали. Иногда они заменяют рабочие инструменты машины — фрезы, резцы, экструдеры и т.д.
По сравнению с автоматизированными производственными линиями, которые спроектированы как единое целое и выполняют одну функцию, коботы и промышленные роботы имеют много преимуществ. А также по сравнению с низкоквалифицированными работниками.
Многозадачность и быстрая реконфигурация — робота можно разместить на любом участке производства, изменив выполняемые им операции, так как роботы по своей конструкции универсальны и требуется лишь изменить программу и аппаратное обеспечение. Коботы особенно хороши в этом.
Простота позиционирования: один кобот или робот может управлять несколькими машинами одновременно, если его правильно расположить и запрограммировать, что позволяет экономить место. Коботы занимают еще меньше места и не нуждаются в выделенной зоне, поскольку могут работать вместе с персоналом.
Это включает в себя простоту ремонта и обслуживания: единообразие оборудования позволяет обслуживать его меньшему количеству людей: для обслуживания роботов на разных производственных участках требуются одни и те же робототехники, в отличие от обслуживания автоматизированных линий, для настройки и ремонта каждой из которых может потребоваться отдельный человек. Что еще более важно: меньше типов оборудования — меньше требуется запасных частей, и их можно держать на складе, сокращая потенциальное время простоя в случае поломки.
Коботы не подвергают работников риску получения травм, а промышленные роботы обычно располагаются на огороженной территории, где они также не представляют опасности. Здесь снова вспоминаются «три Д» робототехники (Dull, Dirty and Dangerous) — заменяя людей в грязных, опасных и угнетающе скучных местах, роботы еще больше повышают безопасность, поскольку грязь и усталость снижают способность людей концентрировать свое внимание, вызывая дополнительный риск травм.
— Адаптация. В отличие от первой разновидности, эти роботы имеют датчики, а также ряд сопутствующих программ. Благодаря сигналам от различных типов датчиков, которые поступают в систему управления, происходит анализ окружающей среды. На основе полученных данных робот может решить, как действовать дальше. Например, он может начать выполнение другой операции, если первая не может быть выполнена.
Промышленные роботы. Типы и структура. Эксплуатация и применение
Промышленные роботы все чаще используются на заводах и производственных предприятиях. Они используются для выполнения функций управления, перемещения и смещения в различных производственных процессах. Их главная особенность заключается в том, что они не устают. Роботы могут работать круглосуточно без вмешательства человека, поскольку для работы им нужна лишь заранее запрограммированная программа. Они могут выполнять только определенные действия, но чаще всего используются в автоматизированных производственных системах.
С помощью роботов можно создать полный производственный цикл, обеспечивающий очень высокий уровень производительности и точности. Более того, он практически исключает производственные ошибки, которые так свойственны человеку. Промышленная робототехника зародилась в 1961 году. Именно тогда был выдан первый патент на робота. Однако первое массовое производство роботов началось уже в 1956 году. Основное развитие роботов для промышленности происходило в 1960-х и 1970-х годах. Именно в этот период был разработан прототип современного робота, который напоминал человеческую руку и имел шесть степеней свободы.
Сегодня промышленных роботов можно условно разделить на три категории, в которых также можно выделить подтипы:
- Автоматические устройства . В эту категорию входят программные роботы, адаптивные роботы и биотехнологические роботы:

— Программные роботы представляют собой простейший тип робота, который управляется автоматически. Этот сорт широко используется благодаря своей низкой стоимости. Они широко используются на заводах для выполнения простых операций по запланированной технологии. В большинстве случаев эти устройства не имеют датчиков. Все операции выполняются по циклической программе, которая заранее хранится в блоке памяти.
— Адаптивный. В отличие от первого типа, эти роботы оснащены датчиками, а также рядом сопутствующих программ. Благодаря сигналам, поступающим в систему управления от различных датчиков, происходит анализ окружающей среды. На основе полученных данных робот может решить, как действовать дальше. Например, он может начать выполнение другой операции, если первая не может быть выполнена.
— Стажеры. Такие роботы способны к обучению, т.е. они выполняют операции в соответствии с предыдущим обучением. Например, люди создают последовательность операций, которые хранятся в блоке управления робота.
— Интеллектуальный. Эти роботы обладают основами искусственного интеллекта, то есть они могут воспринимать окружающую обстановку с помощью сенсорных датчиков без помощи человека. То есть, они создают виртуальное пространство, в котором могут перемещаться и принимать решения о своих дальнейших действиях. Это означает, что они могут учиться на ходу.
Биотехнические устройства . В эту категорию входят командные, подражательные и полуавтономные роботы.

— Командование. Это разновидность манипуляторов, которые дистанционно управляются оператором. Оператор подает команды на движение каждого из суставов. Проще говоря, это просто полуроботы.
— Копирование. Это манипуляторы, которые производят копию действия, выполняемого оператором в данный момент времени. Например, если человек надевает перчатку и шевелит пальцами, робот-копировщик также будет шевелить своими железными пальцами.
— Полуавтоматический. Для управления ими оператору достаточно задать движение руки манипулятора. Система управления устройства сама скоординирует все необходимые движения и при необходимости внесет коррективы.
- Интерактивные промышленные роботы . В эту категорию входят автоматизированные, наблюдательные и разговорные роботы.
— Автоматизированный. Это роботы, в которых автоматизированные режимы процесса управления переплетаются с биотехническими режимами.
— Под руководством. Это роботы, которые выполняют работу автоматически по заданному циклу, но движение от одного шага к другому осуществляется по командам оператора.
— Диалогический. Это автоматические роботы с различными действиями, которые могут взаимодействовать с оператором посредством использования языка с определенным уровнем сложности. Например, с помощью голосовых команд.
Устройство
Промышленные роботы могут различаться по конструкции, что во многом зависит от задач, которые они должны выполнять. Однако в настоящее время наиболее распространенным типом таких устройств являются роботизированные руки.
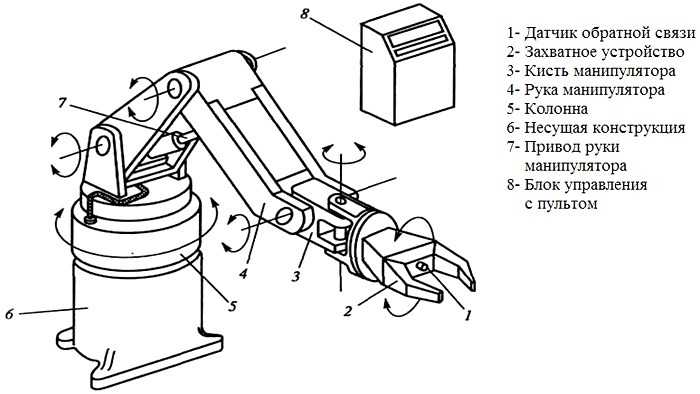
Стандартная роботизированная рука состоит из семи сегментов, соединенных шестью суставами. Каждый сегмент состоит из металлического корпуса и проводов. Каждый сегмент имеет шаговые двигатели, которые приводят суставы в движение. Суставы и робот в целом управляются компьютером, который приводит в движение определенные шаговые двигатели. В некоторых манипуляторах вместо двигателей могут использоваться пневматические или гидравлические компоненты.
Главная особенность шаговых двигателей заключается в том, что они могут обеспечивать очень точные движения. Если компьютер дает команду суставу переместиться ровно на 15 мм, двигатель сделает именно то, что от него требуется. Движение будет точным каждый раз, когда выполняется одно и то же действие.
Датчики движения используются для контроля правильности выполнения роботом необходимых действий. При малейшем отклонении от заданной программы движение корректируется. Если отклонение значительное и не может быть исправлено, сигнал посылается на главный компьютер. В результате робот может быть остановлен, чтобы его можно было отремонтировать.
Манипулятор также имеет захваты, выполненные в форме человеческой руки с механическими пальцами. Если необходимо захватить плоский предмет, вместо механических пальцев можно использовать пневматическую присоску. Если необходимо захватить более одной детали, конструкция может быть выполнена в виде оснастки, специально предназначенной для этой цели. Кроме того, вместо захвата можно использовать другие рабочие инструменты, такие как распылитель, отвертка и т.д.
Промышленные роботы также могут двигаться по дорожке, проложенной по полу в виде монорельса. При необходимости перемещения по неровным поверхностям используются другие конструкции, такие как пневматические присоски и т.д. Роботы могут питаться от аккумулятора, но чаще всего они питаются от промышленной электросети. Для управления роботом используется компьютер, подающий ему команды по проводам или беспроводной связи. Сами роботы также могут иметь блок памяти, в котором хранится нужная программа.
Принцип работы
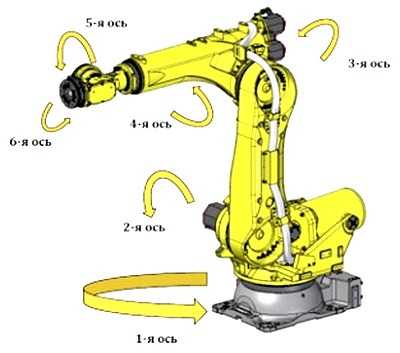
Промышленные роботы с 6 суставами выглядят как человеческая рука (рука, локоть и запястье). В большинстве случаев манипулятор устанавливается на неподвижное основание. В результате такой робот может иметь 6 степеней свободы, что означает, что он может двигаться в 6 различных направлениях.
Подобно человеческой руке, рука также перемещает конечный эффектор из одного места в другое. Оснастив концевой эффектор различными устройствами, робот получает возможность выполнять определенные технологические операции. Одним из наиболее распространенных является устройство, напоминающее руку, которое позволяет роботу захватывать и перемещать предметы с места на место.
Довольно часто манипуляторы имеют встроенные датчики давления, поэтому они могут контролировать силу захвата и не ломать все подряд. Например, роботу может быть поручено переместить лампочку с одного места на другое, чтобы проверить, работает ли она. Если сила велика, пузырь просто лопнет. Контроль силы сжатия гарантирует, что пузырь не пострадает. Другими конечными эффекторами могут быть порошковые распылители, различные сверла и так далее.
Такими роботами можно управлять:
- С помощью программы.
- Адаптивное управление. В этом случае используются сенсорные устройства. Полученные сигналы анализируются, после чего выполняются необходимые действия.
- Она управляется людьми, но на расстоянии.
- Тип искусственного интеллекта.
Приложения

Промышленные роботы могут использоваться практически везде. Уровень автоматизации достиг такого высокого уровня, что она может полностью заменить человека. Один робот может заменить работу нескольких или даже десятков специалистов. Робот не будет испытывать покоя и мира, ему не нужны зарплаты и отчисления в многочисленные социальные фонды, ему не нужно спать и есть. Она не подвержена человеческому фактору, который может привести к неисправностям или выходу из строя дорогостоящих инструментов и оборудования. Именно поэтому многие компании сегодня пытаются автоматизировать свою деятельность.
Читайте далее:- Робототехника для начинающих: курсы, книги.
- Робототехника: все, что нужно знать о роботах.
- АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ it. Что такое система автоматического управления?.
- Кибернетика, что это такое? Происхождение и справочная информация.
- Полезные статьи о том, что такое приказ в электроустановках.
- Урок 3: Языки программирования, используемые в робототехнике.
- ПИД-регулятор.